 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCALEX: Scalable Concept and Latent Exploration for Diffusion Models
Nov 13, 2025Image generation models frequently encode social biases, including stereotypes tied to gender, race, and profession. Existing methods for analyzing these biases in diffusion models either focus narrowly on predefined categories or depend on manual interpretation of latent directions. These constraints limit scalability and hinder the discovery of subtle or unanticipated patterns. We introduce SCALEX, a framework for scalable and automated exploration of diffusion model latent spaces. SCALEX extracts semantically meaningful directions from H-space using only natural language prompts, enabling zero-shot interpretation without retraining or labelling. This allows systematic comparison across arbitrary concepts and large-scale discovery of internal model associations. We show that SCALEX detects gender bias in profession prompts, ranks semantic alignment across identity descriptors, and reveals clustered conceptual structure without supervision. By linking prompts to latent directions directly, SCALEX makes bias analysis in diffusion models more scalable, interpretable, and extensible than prior approaches.
Enhancing Trust in Clinically Significant Prostate Cancer Prediction with Multiple Magnetic Resonance Imaging Modalities
Nov 07, 2024



In the United States, prostate cancer is the second leading cause of deaths in males with a predicted 35,250 deaths in 2024. However, most diagnoses are non-lethal and deemed clinically insignificant which means that the patient will likely not be impacted by the cancer over their lifetime. As a result, numerous research studies have explored the accuracy of predicting clinical significance of prostate cancer based on magnetic resonance imaging (MRI) modalities and deep neural networks. Despite their high performance, these models are not trusted by most clinical scientists as they are trained solely on a single modality whereas clinical scientists often use multiple magnetic resonance imaging modalities during their diagnosis. In this paper, we investigate combining multiple MRI modalities to train a deep learning model to enhance trust in the models for clinically significant prostate cancer prediction. The promising performance and proposed training pipeline showcase the benefits of incorporating multiple MRI modalities for enhanced trust and accuracy.
Decoding Diffusion: A Scalable Framework for Unsupervised Analysis of Latent Space Biases and Representations Using Natural Language Prompts
Oct 25, 2024



Recent advances in image generation have made diffusion models powerful tools for creating high-quality images. However, their iterative denoising process makes understanding and interpreting their semantic latent spaces more challenging than other generative models, such as GANs. Recent methods have attempted to address this issue by identifying semantically meaningful directions within the latent space. However, they often need manual interpretation or are limited in the number of vectors that can be trained, restricting their scope and utility. This paper proposes a novel framework for unsupervised exploration of diffusion latent spaces. We directly leverage natural language prompts and image captions to map latent directions. This method allows for the automatic understanding of hidden features and supports a broader range of analysis without the need to train specific vectors. Our method provides a more scalable and interpretable understanding of the semantic knowledge encoded within diffusion models, facilitating comprehensive analysis of latent biases and the nuanced representations these models learn. Experimental results show that our framework can uncover hidden patterns and associations in various domains, offering new insights into the interpretability of diffusion model latent spaces.
Understanding the Limitations of Diffusion Concept Algebra Through Food
Jun 05, 2024



Image generation techniques, particularly latent diffusion models, have exploded in popularity in recent years. Many techniques have been developed to manipulate and clarify the semantic concepts these large-scale models learn, offering crucial insights into biases and concept relationships. However, these techniques are often only validated in conventional realms of human or animal faces and artistic style transitions. The food domain offers unique challenges through complex compositions and regional biases, which can shed light on the limitations and opportunities within existing methods. Through the lens of food imagery, we analyze both qualitative and quantitative patterns within a concept traversal technique. We reveal measurable insights into the model's ability to capture and represent the nuances of culinary diversity, while also identifying areas where the model's biases and limitations emerge.
Explaining Explainability: Towards Deeper Actionable Insights into Deep Learning through Second-order Explainability
Jun 14, 2023

Explainability plays a crucial role in providing a more comprehensive understanding of deep learning models' behaviour. This allows for thorough validation of the model's performance, ensuring that its decisions are based on relevant visual indicators and not biased toward irrelevant patterns existing in training data. However, existing methods provide only instance-level explainability, which requires manual analysis of each sample. Such manual review is time-consuming and prone to human biases. To address this issue, the concept of second-order explainable AI (SOXAI) was recently proposed to extend explainable AI (XAI) from the instance level to the dataset level. SOXAI automates the analysis of the connections between quantitative explanations and dataset biases by identifying prevalent concepts. In this work, we explore the use of this higher-level interpretation of a deep neural network's behaviour to allows us to "explain the explainability" for actionable insights. Specifically, we demonstrate for the first time, via example classification and segmentation cases, that eliminating irrelevant concepts from the training set based on actionable insights from SOXAI can enhance a model's performance.
ShapeShift: Superquadric-based Object Pose Estimation for Robotic Grasping
Apr 10, 2023



Object pose estimation is a critical task in robotics for precise object manipulation. However, current techniques heavily rely on a reference 3D object, limiting their generalizability and making it expensive to expand to new object categories. Direct pose predictions also provide limited information for robotic grasping without referencing the 3D model. Keypoint-based methods offer intrinsic descriptiveness without relying on an exact 3D model, but they may lack consistency and accuracy. To address these challenges, this paper proposes ShapeShift, a superquadric-based framework for object pose estimation that predicts the object's pose relative to a primitive shape which is fitted to the object. The proposed framework offers intrinsic descriptiveness and the ability to generalize to arbitrary geometric shapes beyond the training set.
MMRNet: Improving Reliability for Multimodal Computer Vision for Bin Picking via Multimodal Redundancy
Oct 19, 2022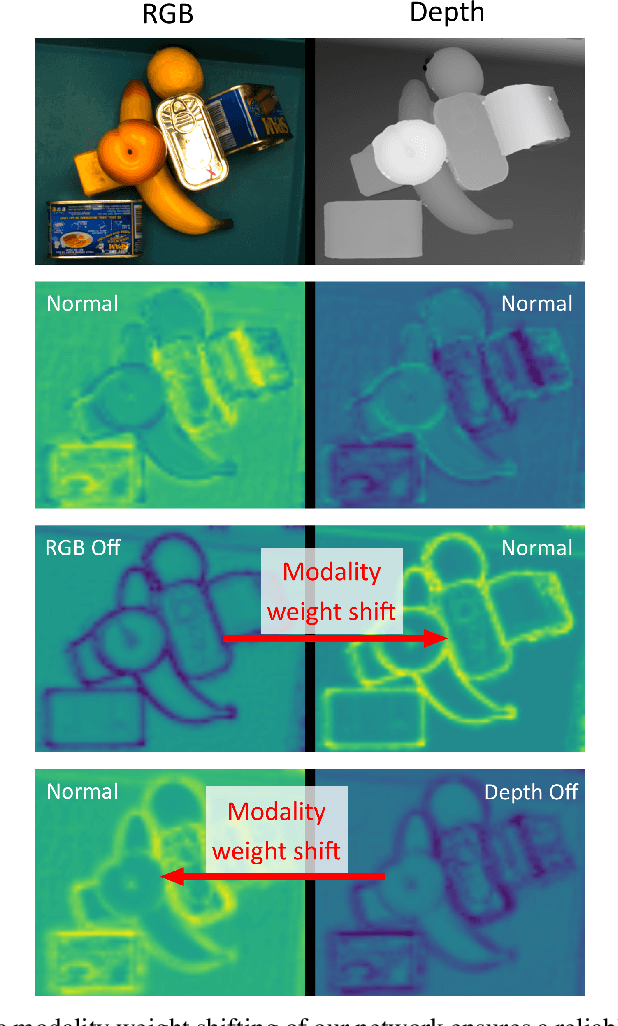
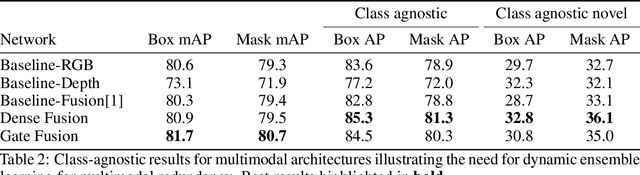
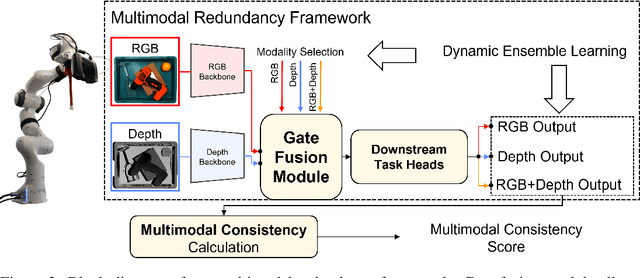

Recently, there has been tremendous interest in industry 4.0 infrastructure to address labor shortages in global supply chains. Deploying artificial intelligence-enabled robotic bin picking systems in real world has become particularly important for reducing labor demands and costs while increasing efficiency. To this end, artificial intelligence-enabled robotic bin picking systems may be used to automate bin picking, but may also cause expensive damage during an abnormal event such as a sensor failure. As such, reliability becomes a critical factor for translating artificial intelligence research to real world applications and products. In this paper, we propose a reliable vision system with MultiModal Redundancy (MMRNet) for tackling object detection and segmentation for robotic bin picking using data from different modalities. This is the first system that introduces the concept of multimodal redundancy to combat sensor failure issues during deployment. In particular, we realize the multimodal redundancy framework with a gate fusion module and dynamic ensemble learning. Finally, we present a new label-free multimodal consistency score that utilizes the output from all modalities to measure the overall system output reliability and uncertainty. Through experiments, we demonstrate that in an event of missing modality, our system provides a much more reliable performance compared to baseline models. We also demonstrate that our MC score is a more powerful reliability indicator for outputs during inference time where model generated confidence score are often over-confident.
MetaGraspNet: A Large-Scale Benchmark Dataset for Scene-Aware Ambidextrous Bin Picking via Physics-based Metaverse Synthesis
Aug 08, 2022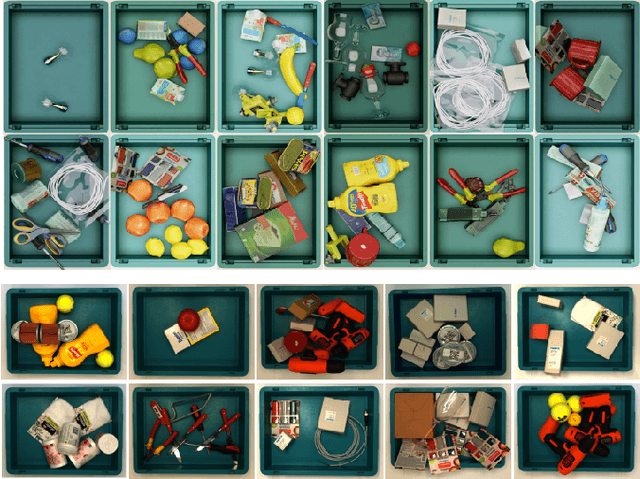
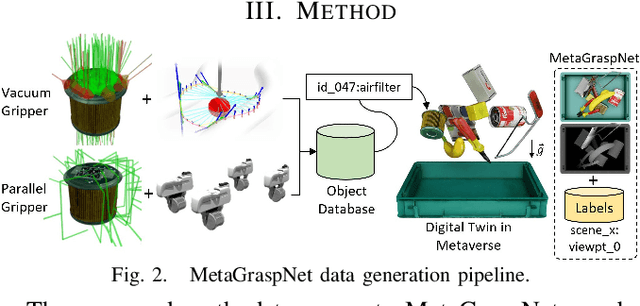
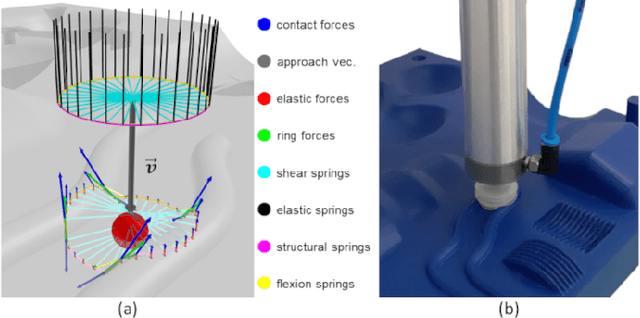
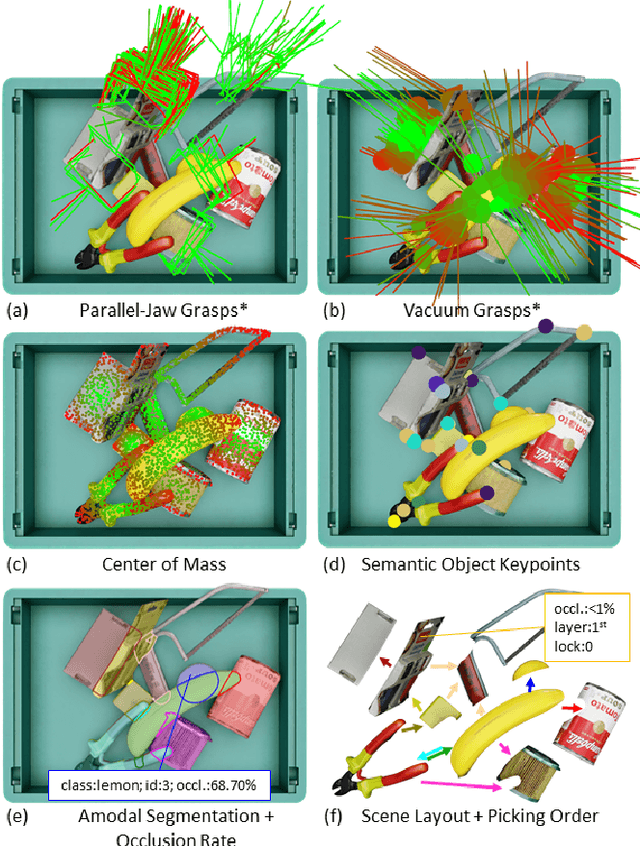
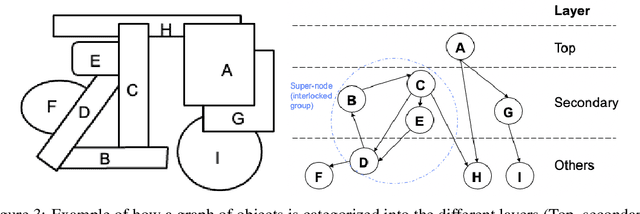
Autonomous bin picking poses significant challenges to vision-driven robotic systems given the complexity of the problem, ranging from various sensor modalities, to highly entangled object layouts, to diverse item properties and gripper types. Existing methods often address the problem from one perspective. Diverse items and complex bin scenes require diverse picking strategies together with advanced reasoning. As such, to build robust and effective machine-learning algorithms for solving this complex task requires significant amounts of comprehensive and high quality data. Collecting such data in real world would be too expensive and time prohibitive and therefore intractable from a scalability perspective. To tackle this big, diverse data problem, we take inspiration from the recent rise in the concept of metaverses, and introduce MetaGraspNet, a large-scale photo-realistic bin picking dataset constructed via physics-based metaverse synthesis. The proposed dataset contains 217k RGBD images across 82 different article types, with full annotations for object detection, amodal perception, keypoint detection, manipulation order and ambidextrous grasp labels for a parallel-jaw and vacuum gripper. We also provide a real dataset consisting of over 2.3k fully annotated high-quality RGBD images, divided into 5 levels of difficulties and an unseen object set to evaluate different object and layout properties. Finally, we conduct extensive experiments showing that our proposed vacuum seal model and synthetic dataset achieves state-of-the-art performance and generalizes to real world use-cases.
COVID-Net US-X: Enhanced Deep Neural Network for Detection of COVID-19 Patient Cases from Convex Ultrasound Imaging Through Extended Linear-Convex Ultrasound Augmentation Learning
Apr 29, 2022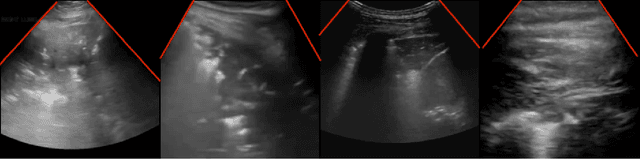
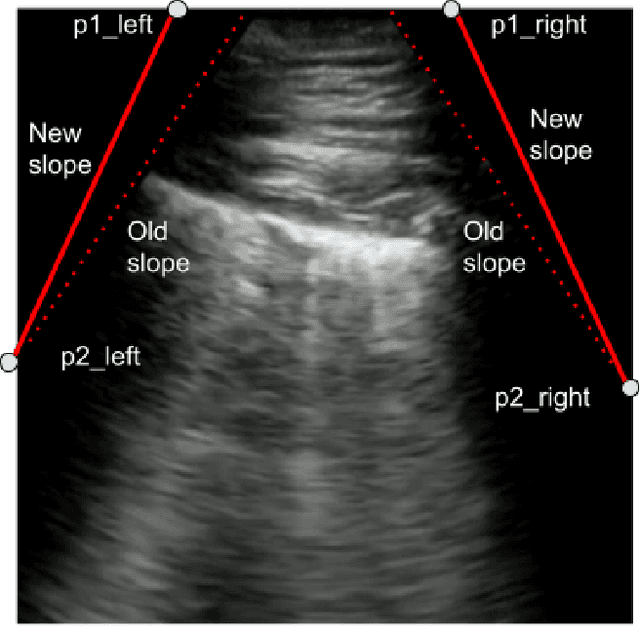
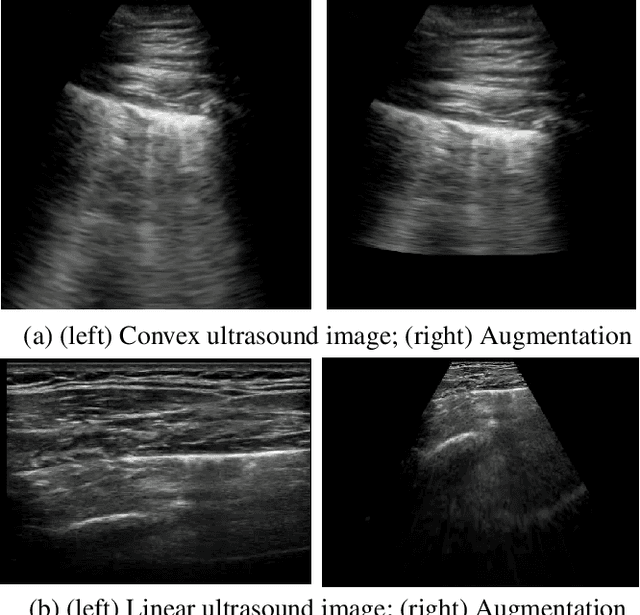
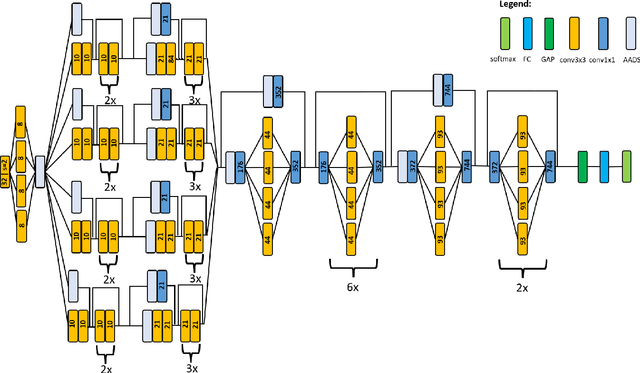
As the global population continues to face significant negative impact by the on-going COVID-19 pandemic, there has been an increasing usage of point-of-care ultrasound (POCUS) imaging as a low-cost and effective imaging modality of choice in the COVID-19 clinical workflow. A major barrier with widespread adoption of POCUS in the COVID-19 clinical workflow is the scarcity of expert clinicians that can interpret POCUS examinations, leading to considerable interest in deep learning-driven clinical decision support systems to tackle this challenge. A major challenge to building deep neural networks for COVID-19 screening using POCUS is the heterogeneity in the types of probes used to capture ultrasound images (e.g., convex vs. linear probes), which can lead to very different visual appearances. In this study, we explore the impact of leveraging extended linear-convex ultrasound augmentation learning on producing enhanced deep neural networks for COVID-19 assessment, where we conduct data augmentation on convex probe data alongside linear probe data that have been transformed to better resemble convex probe data. Experimental results using an efficient deep columnar anti-aliased convolutional neural network designed via a machined-driven design exploration strategy (which we name COVID-Net US-X) show that the proposed extended linear-convex ultrasound augmentation learning significantly increases performance, with a gain of 5.1% in test accuracy and 13.6% in AUC.
MetaGraspNet: A Large-Scale Benchmark Dataset for Vision-driven Robotic Grasping via Physics-based Metaverse Synthesis
Dec 30, 2021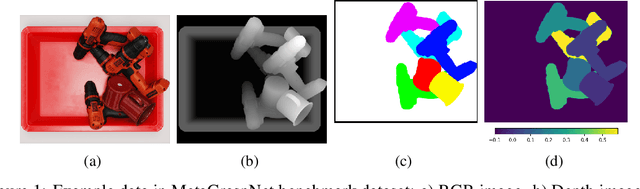
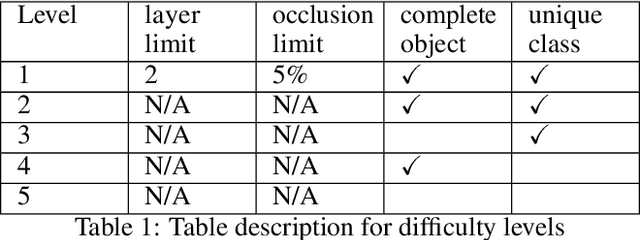
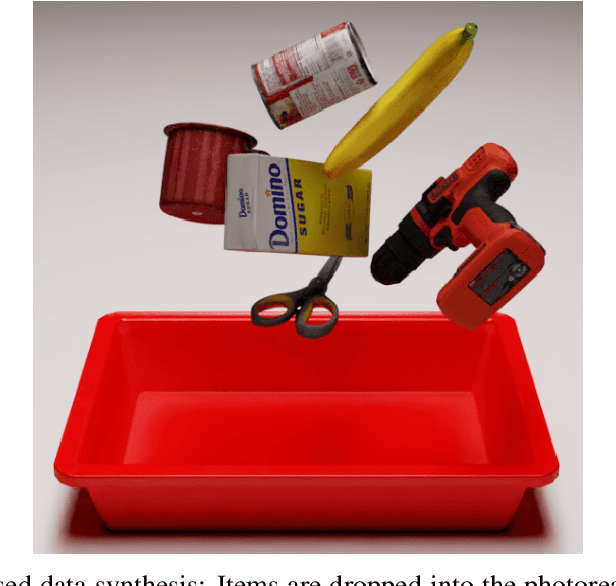
There has been increasing interest in smart factories powered by robotics systems to tackle repetitive, laborious tasks. One impactful yet challenging task in robotics-powered smart factory applications is robotic grasping: using robotic arms to grasp objects autonomously in different settings. Robotic grasping requires a variety of computer vision tasks such as object detection, segmentation, grasp prediction, pick planning, etc. While significant progress has been made in leveraging of machine learning for robotic grasping, particularly with deep learning, a big challenge remains in the need for large-scale, high-quality RGBD datasets that cover a wide diversity of scenarios and permutations. To tackle this big, diverse data problem, we are inspired by the recent rise in the concept of metaverse, which has greatly closed the gap between virtual worlds and the physical world. Metaverses allow us to create digital twins of real-world manufacturing scenarios and to virtually create different scenarios from which large volumes of data can be generated for training models. In this paper, we present MetaGraspNet: a large-scale benchmark dataset for vision-driven robotic grasping via physics-based metaverse synthesis. The proposed dataset contains 100,000 images and 25 different object types and is split into 5 difficulties to evaluate object detection and segmentation model performance in different grasping scenarios. We also propose a new layout-weighted performance metric alongside the dataset for evaluating object detection and segmentation performance in a manner that is more appropriate for robotic grasp applications compared to existing general-purpose performance metrics. Our benchmark dataset is available open-source on Kaggle, with the first phase consisting of detailed object detection, segmentation, layout annotations, and a layout-weighted performance metric script.