 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSubject-Aware Multi-Granularity Alignment for Zero-Shot EEG-to-Image Retrieval
Apr 20, 2026Zero-shot EEG-to-image retrieval aims to decode perceived visual content from electroencephalography (EEG) by aligning neural responses with pretrained visual representations, providing a promising route toward scalable visual neural decoding and practical brain-computer interfaces. However, robust EEG-to-image retrieval remains challenging, because prior methods usually rely on either a single fixed visual target or a subject-invariant target construction scheme. Such designs overlook two important properties of visually evoked EEG signals: they preserve information across multiple representational scales, and the visual granularity best matched to EEG may vary across subjects. To address these issues, subject-aware multi-granularity alignment (SAMGA) framework is proposed for zero-shot EEG-to-image retrieval. SAMGA first constructs a subject-aware visual supervision target by adaptively aggregating multiple intermediate representations from a pretrained vision encoder, allowing the model to absorb subject-dependent granularity deviations during training while preserving subject-agnostic inference. Building on this adaptive target construction, a coarse-to-fine cross-modal alignment strategy is further designed with a shared encoder wherein the coarse stage stabilizes the shared semantic geometry and reduces subject-induced distribution shift, and the fine stage further improves instance-level retrieval discrimination. Extensive experiments on the THINGS-EEG benchmark demonstrate that the proposed method achieves 91.3% Top-1 and 98.8% Top-5 accuracy in the intra-subject setting, and 34.4% Top-1 and 64.8% Top-5 accuracy in the inter-subject setting, outperforming recent state-of-the-art methods.
Artificial intelligence empowered multi-AGVs in manufacturing systems
Sep 08, 2019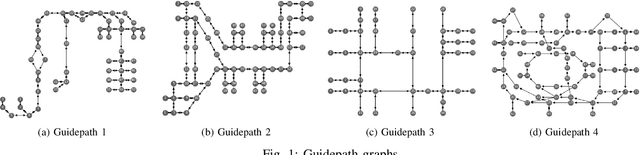
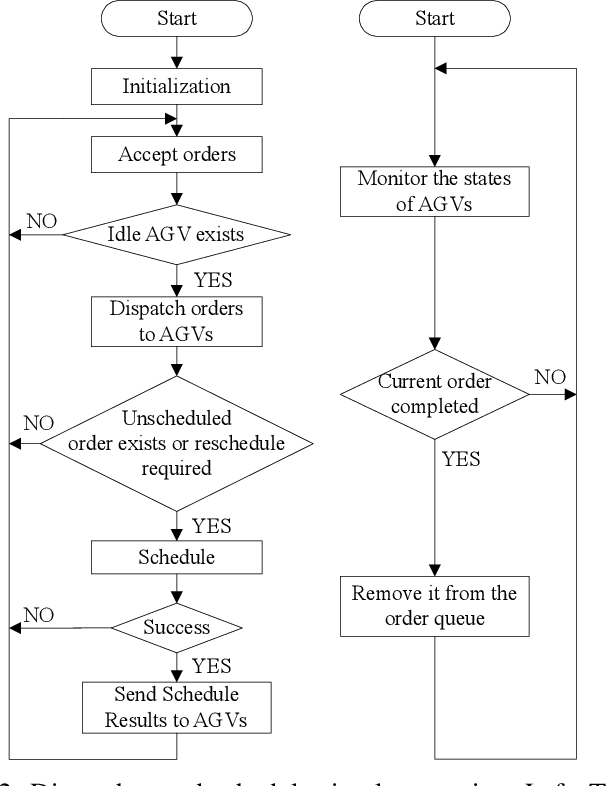
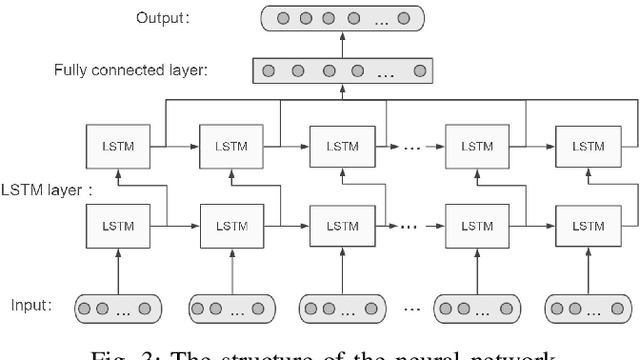
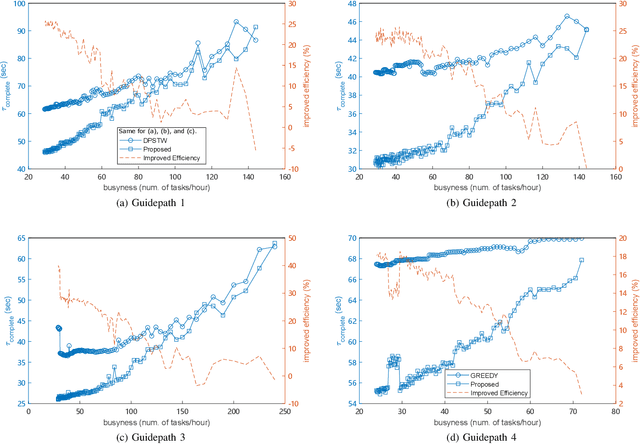
AGVs are driverless robotic vehicles that picks up and delivers materials. How to improve the efficiency while preventing deadlocks is the core issue in designing AGV systems. In this paper, we propose an approach to tackle this problem.The proposed approach includes a traditional AGV scheduling algorithm, which aims at solving deadlock problems, and an artificial neural network based component, which predict future tasks of the AGV system, and make decisions on whether to send an AGV to the predicted starting location of the upcoming task,so as to save the time of waiting for an AGV to go to there first when the upcoming task is created. Simulation results show that the proposed method significantly improves the efficiency as against traditional method, up to 20% to 30%.