 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew to Big: Prototype Expansion Network via Diffusion Learner for Point Cloud Few-shot Semantic Segmentation
Sep 16, 2025Few-shot 3D point cloud semantic segmentation aims to segment novel categories using a minimal number of annotated support samples. While existing prototype-based methods have shown promise, they are constrained by two critical challenges: (1) Intra-class Diversity, where a prototype's limited representational capacity fails to cover a class's full variations, and (2) Inter-set Inconsistency, where prototypes derived from the support set are misaligned with the query feature space. Motivated by the powerful generative capability of diffusion model, we re-purpose its pre-trained conditional encoder to provide a novel source of generalizable features for expanding the prototype's representational range. Under this setup, we introduce the Prototype Expansion Network (PENet), a framework that constructs big-capacity prototypes from two complementary feature sources. PENet employs a dual-stream learner architecture: it retains a conventional fully supervised Intrinsic Learner (IL) to distill representative features, while introducing a novel Diffusion Learner (DL) to provide rich generalizable features. The resulting dual prototypes are then processed by a Prototype Assimilation Module (PAM), which adopts a novel push-pull cross-guidance attention block to iteratively align the prototypes with the query space. Furthermore, a Prototype Calibration Mechanism (PCM) regularizes the final big capacity prototype to prevent semantic drift. Extensive experiments on the S3DIS and ScanNet datasets demonstrate that PENet significantly outperforms state-of-the-art methods across various few-shot settings.
Fast Compressive Channel Estimation for MmWave MIMO Hybrid Beamforming Systems
Jul 28, 2022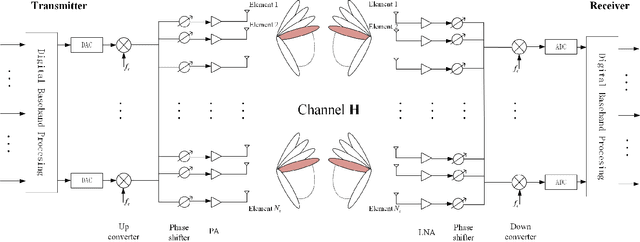
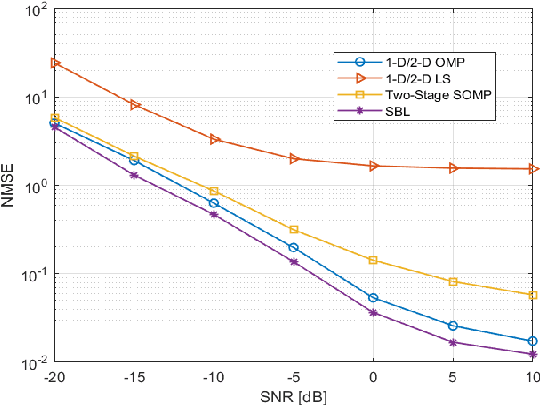
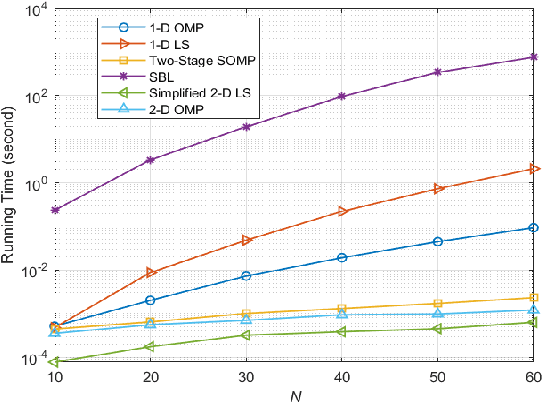
Given the high degree of computational complexity of the channel estimation technique based on the conventional one-dimensional (1-D) compressive sensing (CS) framework employed in the hybrid beamforming architecture, this study proposes two low-complexity channel estimation strategies. One is two-stage CS, which exploits row-group sparsity to estimate angle-of-arrival (AoA) first and uses the conventional 1-D CS method to obtain angle-of-departure (AoD). The other is two-dimensional (2-D) CS, which utilizes a 2-D dictionary to reconstruct the 2-D sparse signal. To conduct a meaningful comparison of the three CS frameworks, i.e., 1-D, two-stage and 2-D CS, the orthogonal match pursuit (OMP) algorithm is employed as the basic algorithm and is expanded to two variants for the proposed frameworks. Analysis and simulations demonstrate that when the 1-D CS method is compared, two-stage CS has somewhat lower performance but significantly lower computational complexity, while 2-D CS is not only the same as 1-D CS in terms of performance but also slightly lower in computational complexity than two-stage CS.