 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegion and Object based Panoptic Image Synthesis through Conditional GANs
Dec 14, 2019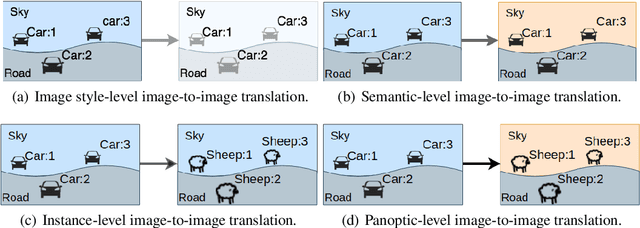
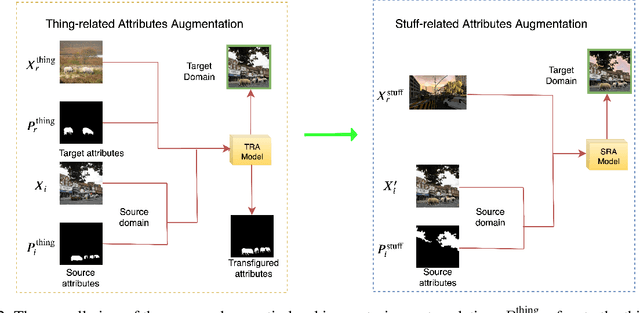
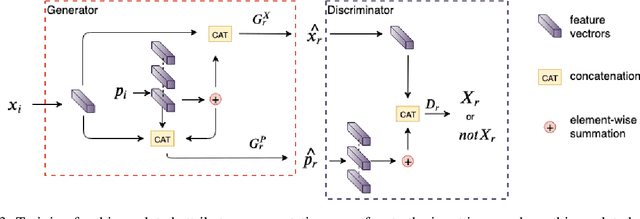
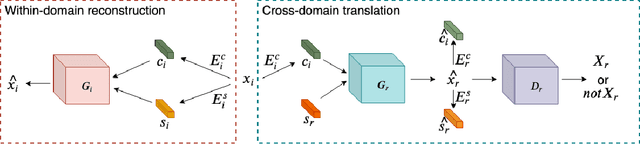
Image-to-image translation is significant to many computer vision and machine learning tasks such as image synthesis and video synthesis. It has primary applications in the graphics editing and animation industries. With the development of generative adversarial networks, a lot of attention has been drawn to image-to-image translation tasks. In this paper, we propose and investigate a novel task named as panoptic-level image-to-image translation and a naive baseline of solving this task. Panoptic-level image translation extends the current image translation task to two separate objectives of semantic style translation (adjust the style of objects to that of different domains) and instance transfiguration (swap between different types of objects). The proposed task generates an image from a complete and detailed panoptic perspective which can enrich the context of real-world vision synthesis. Our contribution consists of the proposal of a significant task worth investigating and a naive baseline of solving it. The proposed baseline consists of the multiple instances sequential translation and semantic-level translation with domain-invariant content code.
3D Global Convolutional Adversarial Network\\ for Prostate MR Volume Segmentation
Jul 18, 2018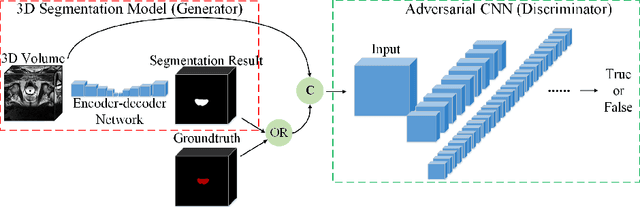
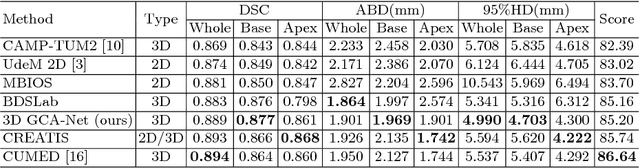
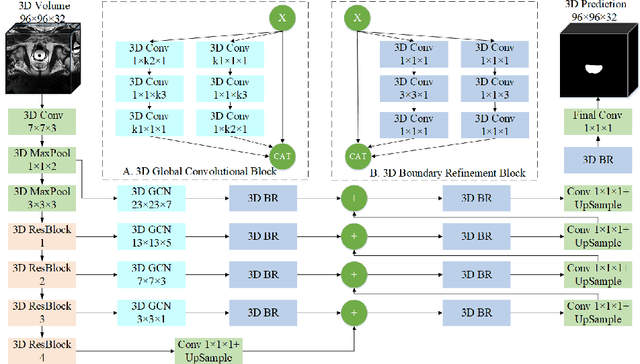
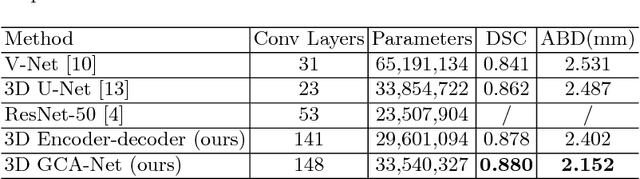
Advanced deep learning methods have been developed to conduct prostate MR volume segmentation in either a 2D or 3D fully convolutional manner. However, 2D methods tend to have limited segmentation performance, since large amounts of spatial information of prostate volumes are discarded during the slice-by-slice segmentation process; and 3D methods also have room for improvement, since they use isotropic kernels to perform 3D convolutions whereas most prostate MR volumes have anisotropic spatial resolution. Besides, the fully convolutional structural methods achieve good performance for localization issues but neglect the per-voxel classification for segmentation tasks. In this paper, we propose a 3D Global Convolutional Adversarial Network (3D GCA-Net) to address efficient prostate MR volume segmentation. We first design a 3D ResNet encoder to extract 3D features from prostate scans, and then develop the decoder, which is composed of a multi-scale 3D global convolutional block and a 3D boundary refinement block, to address the classification and localization issues simultaneously for volumetric segmentation. Additionally, we combine the encoder-decoder segmentation network with an adversarial network in the training phrase to enforce the contiguity of long-range spatial predictions. Throughout the proposed model, we use anisotropic convolutional processing for better feature learning on prostate MR scans. We evaluated our 3D GCA-Net model on two public prostate MR datasets and achieved state-of-the-art performances.