 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Generalist Game Players: An Investigation of Foundation Models in the Game Multiverse
May 11, 2026The real world unfolds along a single set of physics laws, yet human intelligence demonstrates a remarkable capacity to generalize experiences from this singular physical existence into a multiverse of games, each governed by entirely different rules, aesthetics, physics, and objectives. This omni-reality adaptability is a hallmark of general intelligence. As Artificial Intelligence progresses towards Artificial General Intelligence, the multiverse of games has evolved from mere entertainment into the ultimate ground for training and evaluating AGI. The pursuit of this generality has unfolded across four eras: from environment-specific symbolic and reinforcement learning agents, to current large foundation models acting as generalist players, and toward a future creator stage where agent both creates new game worlds and continually evolves within them. We trace the full lifecycle of a generalist game player along four interdependent pillars: Dataset, Model, Harness, and Benchmark. Every advance across these pillars can be read as an attempt to break one of five fundamental trade-offs that currently bound the whole system. Building on this end-to-end view, we chart a five-level roadmap, progressing from single-game mastery to the ultimate creator stage in which the agent simultaneously creates and evolves within theoretical game multiverse. Taken together, our work offers a unified lens onto a rapidly shifting field,and a principled path toward the omnipotent generalist agent capable of seamlessly mastering any challenge within the multiverse of games, thereby paving the way for AGI.
Virtual Model Control for Wheel-legged Robotic Systems with Prescribed Transient Performance
Nov 09, 2020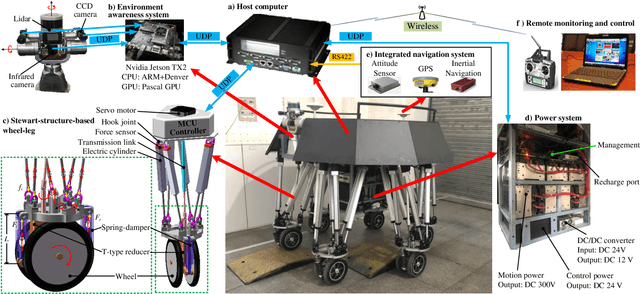
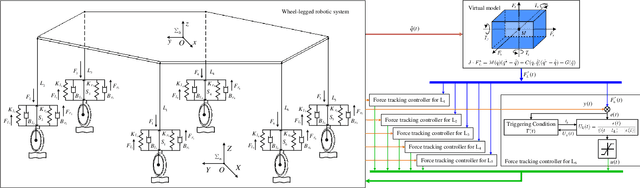
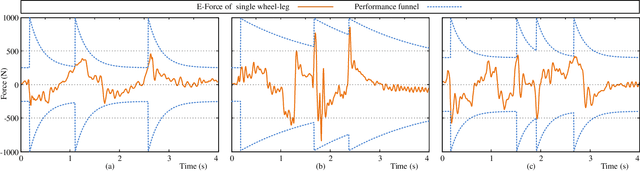
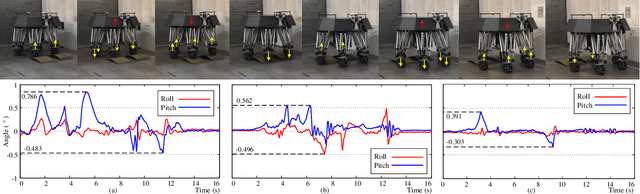
This work proposes a posture adjustment strategy for wheel-legged mechanisms via virtual model control with prescribed transient performance. A simple model of a rigid block subjected to a 6-dimensional force at the center of gravity (CoG) is introduced to be the virtual model of the wheel-legged control system. The force tracking of the wheel-legs is realized with prescribed transient performance based on the funnel control strategy. To improve the robustness of the scheme, an event-triggering condition is designed for on-line segment of the funnel function, such that the force tracking error evolves inside the performance funnel with proved convergence. The absence of Zeno behavior for the event-based mechanism is also guaranteed. With the force references of the wheel-legs are planned for the vector sum tracks the 6-dimensional force from the virtual model, the posture adjustment is achieved on uneven roads by the force tracking of wheel-legs. Experimental results are presented to validate the stability and effectiveness of the proposed method.