 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgents' Last Exam
Jun 03, 2026Recent AI systems have achieved strong results on a wide range of benchmarks, yet these gains have not translated into economically meaningful deployment across many professional domains. We argue that this gap is largely an evaluation problem: widely used benchmarks lack sustained performance measurement on real and economically valuable workflows. This paper introduces Agents' Last Exam (ALE), a benchmark designed to evaluate AI agents on long-horizon, economically valuable, real-world tasks with verifiable outcomes. Developed in collaboration with 250+ industry experts, ALE covers non-physical industries defined with reference to O*NET / SOC 2018 (the U.S. federal occupational taxonomy). It is organized around a task taxonomy with 55 subfields grouped into 13 industry clusters covering 1K+ tasks. Current results show that the hardest tier remains far from saturated: across mainstream harness and backbone configurations, the average full pass rate is 2.6%. ALE is designed as a living benchmark: its task pool grows continuously as new workflows and industries are onboarded. More broadly, ALE is intended not merely as another leaderboard, but as an instrument for closing the gap between benchmark success and GDP-relevant impact.
Bias-VarianceTrade-off in Kalman Filter-Based Disturbance Observers
Oct 07, 2024The performance of disturbance observers is strongly influenced by the level of prior knowledge about the disturbance model. The simultaneous input and state estimation (SISE) algorithm is widely recognized for providing unbiased minimum-variance estimates under arbitrary disturbance models. In contrast, the Kalman filter-based disturbance observer (KF-DOB) achieves minimum mean-square error estimation when the disturbance model is fully specified. However, practical scenarios often fall between these extremes, where only partial knowledge of the disturbance model is available. This paper investigates the inherent bias-variance trade-off in KF-DOB when the disturbance model is incomplete. We further show that SISE can be interpreted as a special case of KF-DOB, where the disturbance noise covariance tends to infinity. To address this trade-off, we propose two novel estimators: the multi-kernel correntropy Kalman filter-based disturbance observer (MKCKF-DOB) and the interacting multiple models Kalman filter-based disturbance observer (IMMKF-DOB). Simulations verify the effectiveness of the proposed methods.
Multi-kernel Correntropy-based Orientation Estimation of IMUs: Gradient Descent Methods
Apr 13, 2023



This paper presents two computationally efficient algorithms for the orientation estimation of inertial measurement units (IMUs): the correntropy-based gradient descent (CGD) and the correntropy-based decoupled orientation estimation (CDOE). Traditional methods, such as gradient descent (GD) and decoupled orientation estimation (DOE), rely on the mean squared error (MSE) criterion, making them vulnerable to external acceleration and magnetic interference. To address this issue, we demonstrate that the multi-kernel correntropy loss (MKCL) is an optimal objective function for maximum likelihood estimation (MLE) when the noise follows a type of heavy-tailed distribution. In certain situations, the estimation error of the MKCL is bounded even in the presence of arbitrarily large outliers. By replacing the standard MSE cost function with MKCL, we develop the CGD and CDOE algorithms. We evaluate the effectiveness of our proposed methods by comparing them with existing algorithms in various situations. Experimental results indicate that our proposed methods (CGD and CDOE) outperform their conventional counterparts (GD and DOE), especially when faced with external acceleration and magnetic disturbances. Furthermore, the new algorithms demonstrate significantly lower computational complexity than Kalman filter-based approaches, making them suitable for applications with low-cost microprocessors.
Virtual Model Control for Wheel-legged Robotic Systems with Prescribed Transient Performance
Nov 09, 2020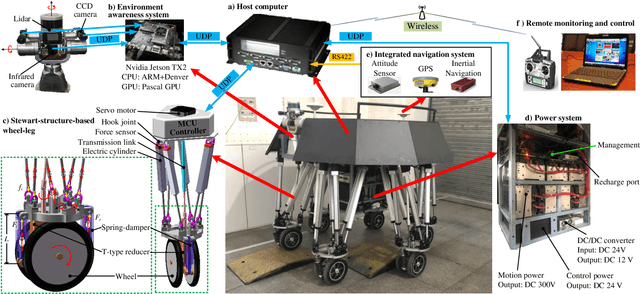
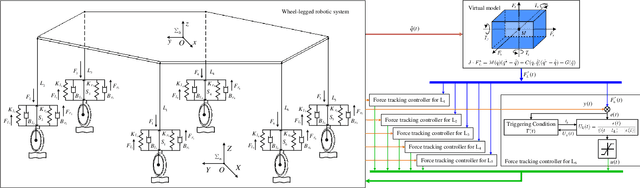
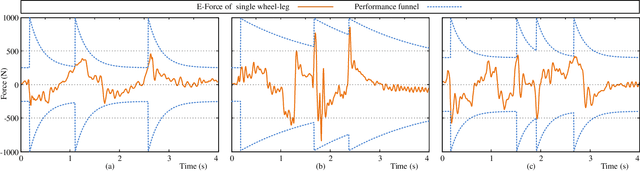
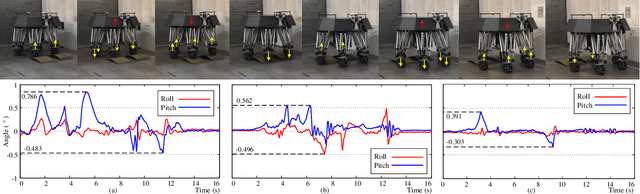
This work proposes a posture adjustment strategy for wheel-legged mechanisms via virtual model control with prescribed transient performance. A simple model of a rigid block subjected to a 6-dimensional force at the center of gravity (CoG) is introduced to be the virtual model of the wheel-legged control system. The force tracking of the wheel-legs is realized with prescribed transient performance based on the funnel control strategy. To improve the robustness of the scheme, an event-triggering condition is designed for on-line segment of the funnel function, such that the force tracking error evolves inside the performance funnel with proved convergence. The absence of Zeno behavior for the event-based mechanism is also guaranteed. With the force references of the wheel-legs are planned for the vector sum tracks the 6-dimensional force from the virtual model, the posture adjustment is achieved on uneven roads by the force tracking of wheel-legs. Experimental results are presented to validate the stability and effectiveness of the proposed method.