 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMindChat: A Privacy-preserving Large Language Model for Mental Health Support
Jan 05, 2026Large language models (LLMs) have shown promise for mental health support, yet training such models is constrained by the scarcity and sensitivity of real counseling dialogues. In this article, we present MindChat, a privacy-preserving LLM for mental health support, together with MindCorpus, a synthetic multi-turn counseling dataset constructed via a multi-agent role-playing framework. To synthesize high-quality counseling data, the developed dialogue-construction framework employs a dual closed-loop feedback design to integrate psychological expertise and counseling techniques through role-playing: (i) turn-level critique-and-revision to improve coherence and counseling appropriateness within a session, and (ii) session-level strategy refinement to progressively enrich counselor behaviors across sessions. To mitigate privacy risks under decentralized data ownership, we fine-tune the base model using federated learning with parameter-efficient LoRA adapters and incorporate differentially private optimization to reduce membership and memorization risks. Experiments on synthetic-data quality assessment and counseling capability evaluation show that MindCorpus improves training effectiveness and that MindChat is competitive with existing general and counseling-oriented LLM baselines under both automatic LLM-judge and human evaluation protocols, while exhibiting reduced privacy leakage under membership inference attacks.
A Novel Actuation Strategy for an Agile Bio-inspired FWAV Performing a Morphing-coupled Wingbeat Pattern
Nov 03, 2021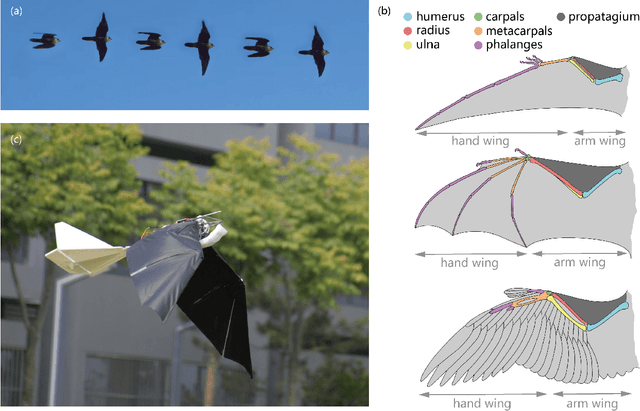
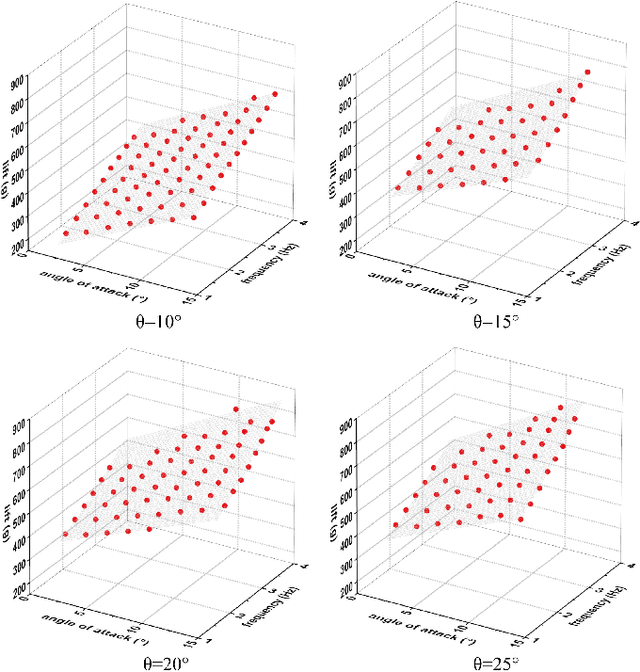
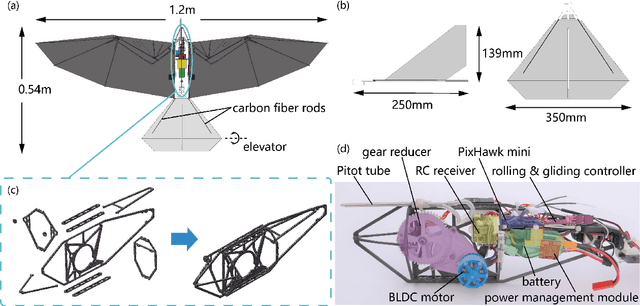
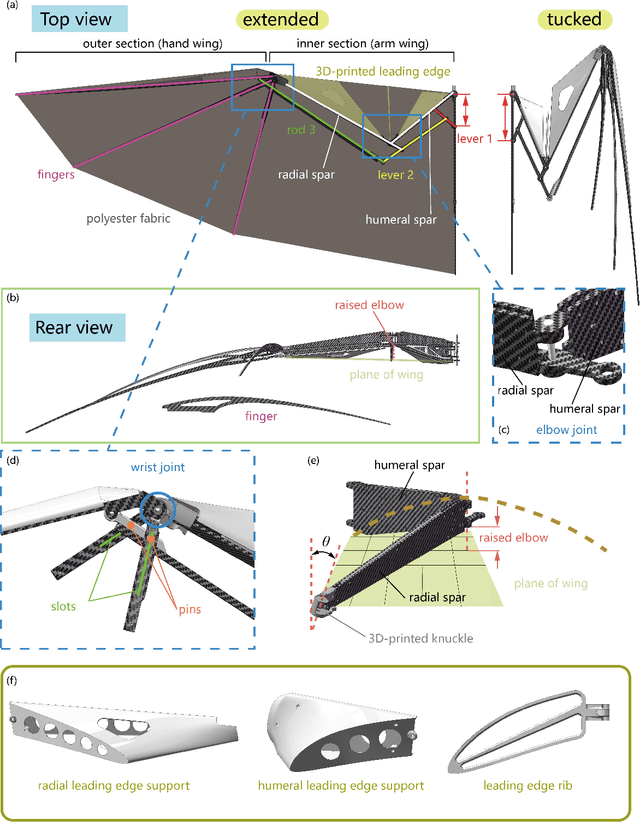
Flying vertebrates exhibit sophisticated wingbeat kinematics. Their specialized forelimbs allow for the wing morphing motion to couple with the flapping motion during their level flight, Previous flyable bionic platforms have successfully applied bio-inspired wing morphing but cannot yet be propelled by the morphing-coupled wingbeat pattern. Spurred by this, we develop a bio-inspired flapping-wing aerial vehicle (FWAV) entitled RoboFalcon, which is equipped with a novel mechanism to drive the bat-style morphing wings, performs a morphing-coupled wingbeat pattern, and overall manages an appealing flight. The novel mechanism of RoboFalcon allows coupling the morphing and flapping during level flight and decoupling these when maneuvering is required, producing a bilateral asymmetric downstroke affording high rolling agility. The bat-style morphing wing is designed with a tilted mounting angle around the radius at the wrist joint to mimic the wrist supination and pronation effect of flying vertebrates' forelimbs. The agility of RoboFalcon is assessed through several rolling maneuver flight tests, and we demonstrate its well-performing agility capability compared to flying creatures and current flapping-wing platforms. Wind tunnel tests indicate that the roll moment of the asymmetric downstroke is correlated with the flapping frequency, and the wrist mounting angle can be used for tuning the angle of attack and lift-thrust configuration of the equilibrium flight state. We believe that this work yields a well-performing bionic platform and provides a new actuation strategy for the morphing-coupled flapping flight.