 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis of Efficient Transmission Methods of Grid Maps for Intelligent Vehicles
Apr 02, 2026Grid mapping is a fundamental approach to modeling the environment of intelligent vehicles or robots. Compared with object-based environment modeling, grid maps offer the distinct advantage of representing the environment without requiring any assumptions about objects, such as type or shape. For grid-map-based approaches, the environment is divided into cells, each containing information about its respective area, such as occupancy. This representation of the entire environment is crucial for achieving higher levels of autonomy. However, it has the drawback that modeling the scene at the cell level results in inherently large data sizes. Patched grid maps tackle this issue to a certain extent by adapting cell sizes in specific areas. Nevertheless, the data sizes of patched grid maps are still too large for novel distributed processing setups or vehicle-to-everything (V2X) applications. Our work builds on a patch-based grid-map approach and investigates the size problem from a communication perspective. To address this, we propose a patch-based communication pipeline that leverages existing compression algorithms to transmit grid-map data efficiently. We provide a comprehensive analysis of this pipeline for both intra-vehicle and V2X-based communication. The analysis is verified for these use cases with two real-world experiment setups. Finally, we summarize recommended guidelines for the efficient transmission of grid-map data in intelligent transportation systems.
Anomaly Detection in Radar Data Using PointNets
Sep 20, 2021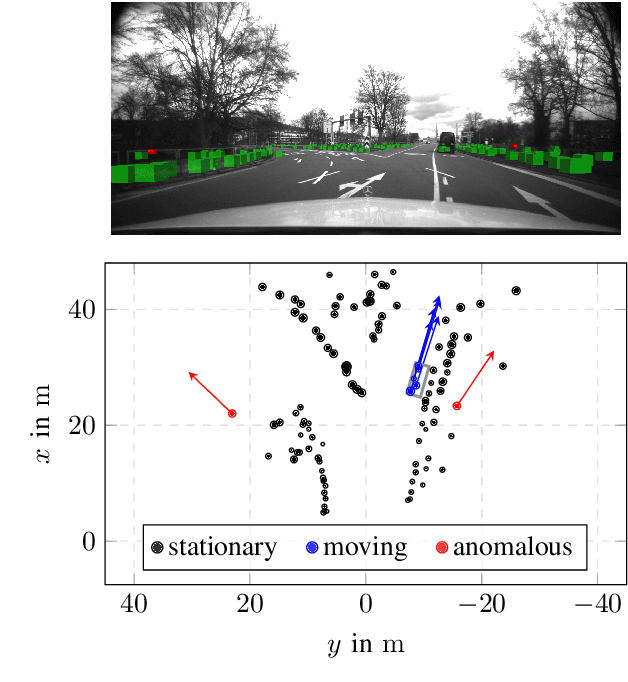
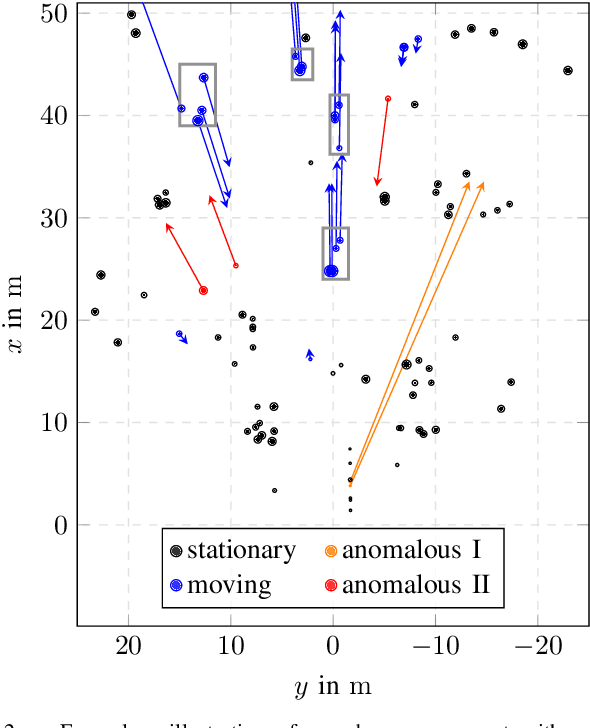
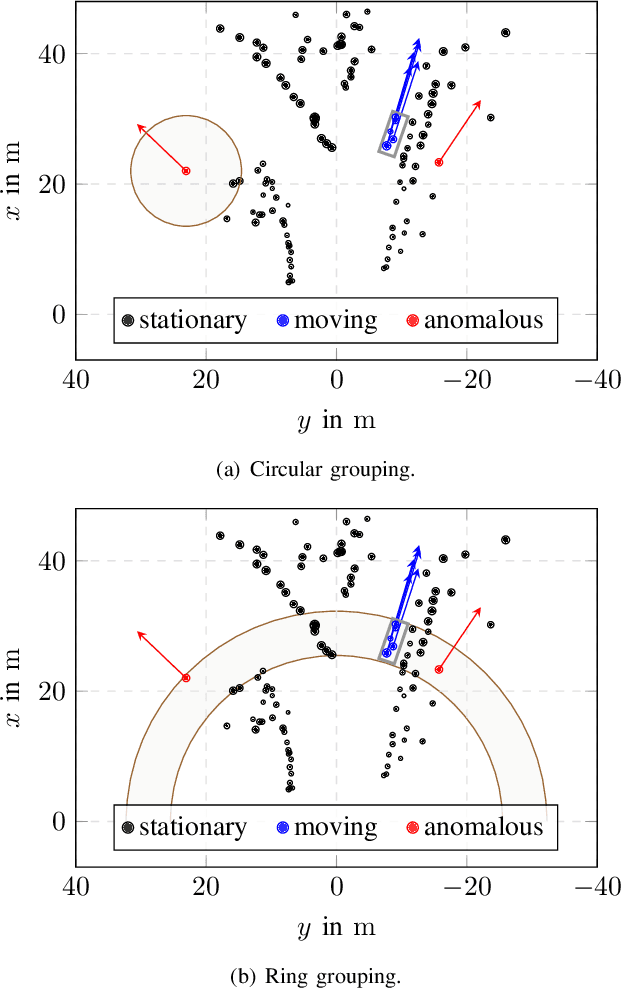
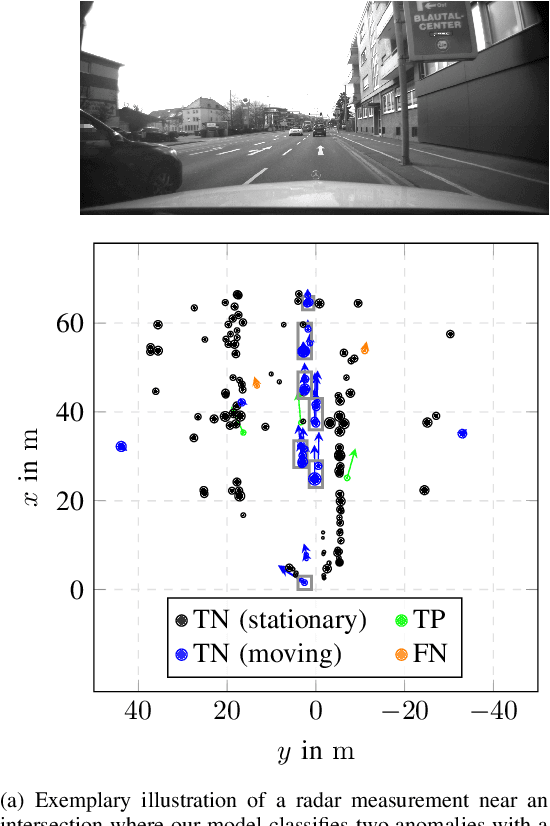
For autonomous driving, radar is an important sensor type. On the one hand, radar offers a direct measurement of the radial velocity of targets in the environment. On the other hand, in literature, radar sensors are known for their robustness against several kinds of adverse weather conditions. However, on the downside, radar is susceptible to ghost targets or clutter which can be caused by several different causes, e.g., reflective surfaces in the environment. Ghost targets, for instance, can result in erroneous object detections. To this end, it is desirable to identify anomalous targets as early as possible in radar data. In this work, we present an approach based on PointNets to detect anomalous radar targets. Modifying the PointNet-architecture driven by our task, we developed a novel grouping variant which contributes to a multi-form grouping module. Our method is evaluated on a real-world dataset in urban scenarios and shows promising results for the detection of anomalous radar targets.