 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNEUROSPF: A tool for the Symbolic Analysis of Neural Networks
Feb 27, 2021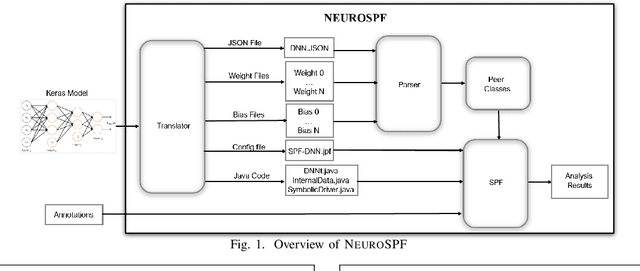
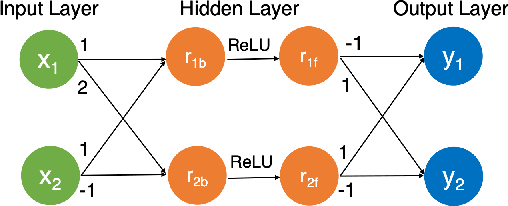
This paper presents NEUROSPF, a tool for the symbolic analysis of neural networks. Given a trained neural network model, the tool extracts the architecture and model parameters and translates them into a Java representation that is amenable for analysis using the Symbolic PathFinder symbolic execution tool. Notably, NEUROSPF encodes specialized peer classes for parsing the model's parameters, thereby enabling efficient analysis. With NEUROSPF the user has the flexibility to specify either the inputs or the network internal parameters as symbolic, promoting the application of program analysis and testing approaches from software engineering to the field of machine learning. For instance, NEUROSPF can be used for coverage-based testing and test generation, finding adversarial examples and also constraint-based repair of neural networks, thus improving the reliability of neural networks and of the applications that use them. Video URL: https://youtu.be/seal8fG78LI
Fast, Structured Clinical Documentation via Contextual Autocomplete
Jul 29, 2020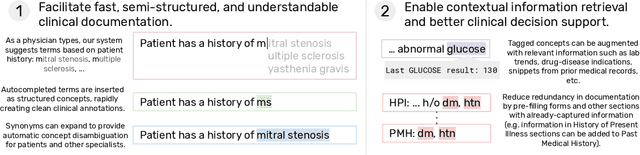
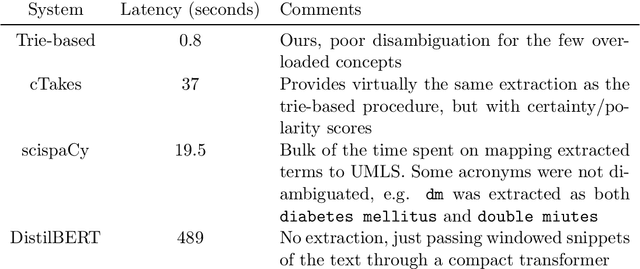
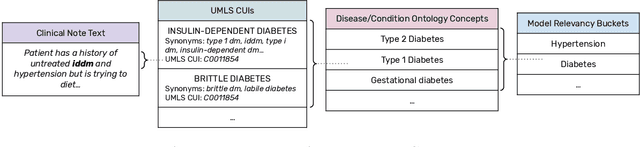

We present a system that uses a learned autocompletion mechanism to facilitate rapid creation of semi-structured clinical documentation. We dynamically suggest relevant clinical concepts as a doctor drafts a note by leveraging features from both unstructured and structured medical data. By constraining our architecture to shallow neural networks, we are able to make these suggestions in real time. Furthermore, as our algorithm is used to write a note, we can automatically annotate the documentation with clean labels of clinical concepts drawn from medical vocabularies, making notes more structured and readable for physicians, patients, and future algorithms. To our knowledge, this system is the only machine learning-based documentation utility for clinical notes deployed in a live hospital setting, and it reduces keystroke burden of clinical concepts by 67% in real environments.
Parallelization Techniques for Verifying Neural Networks
Apr 26, 2020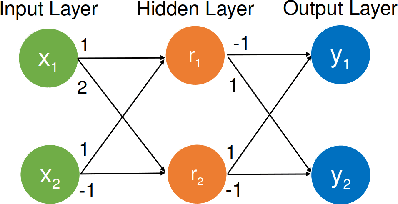
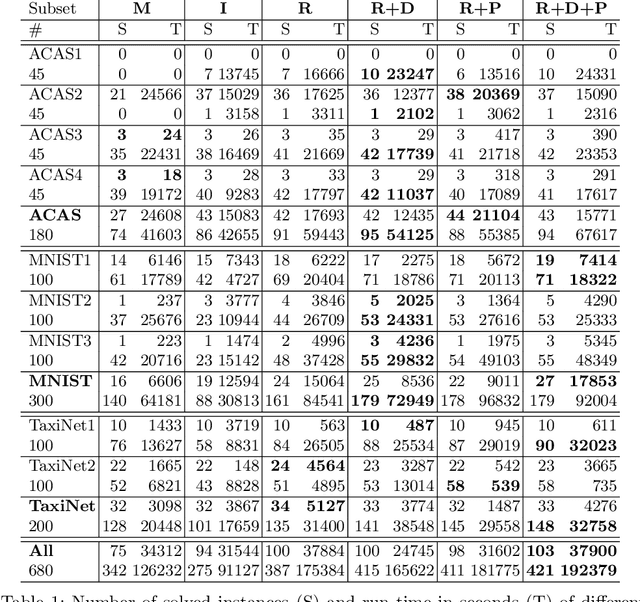

Inspired by recent successes with parallel optimization techniques for solving Boolean satisfiability, we investigate a set of strategies and heuristics that aim to leverage parallel computing to improve the scalability of neural network verification. We introduce an algorithm based on partitioning the verification problem in an iterative manner and explore two partitioning strategies, that work by partitioning the input space or by case splitting on the phases of the neuron activations, respectively. We also introduce a highly parallelizable pre-processing algorithm that uses the neuron activation phases to simplify the neural network verification problems. An extensive experimental evaluation shows the benefit of these techniques on both existing benchmarks and new benchmarks from the aviation domain. A preliminary experiment with ultra-scaling our algorithm using a large distributed cloud-based platform also shows promising results.
A Programmatic and Semantic Approach to Explaining and DebuggingNeural Network Based Object Detectors
Dec 01, 2019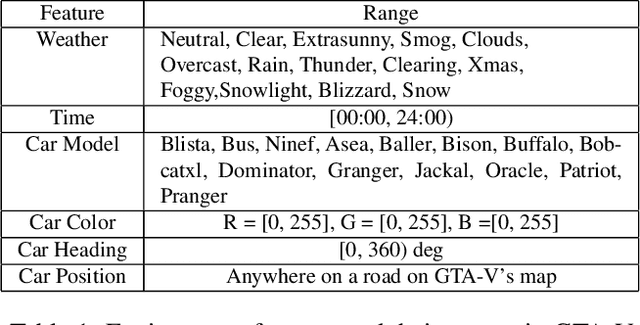
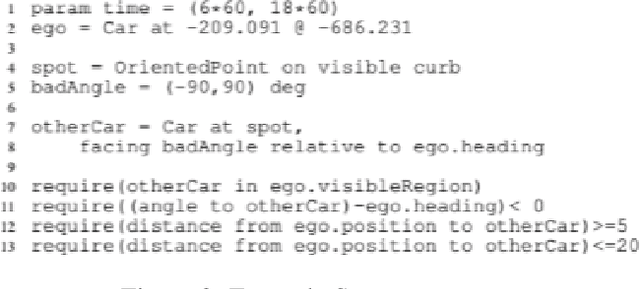
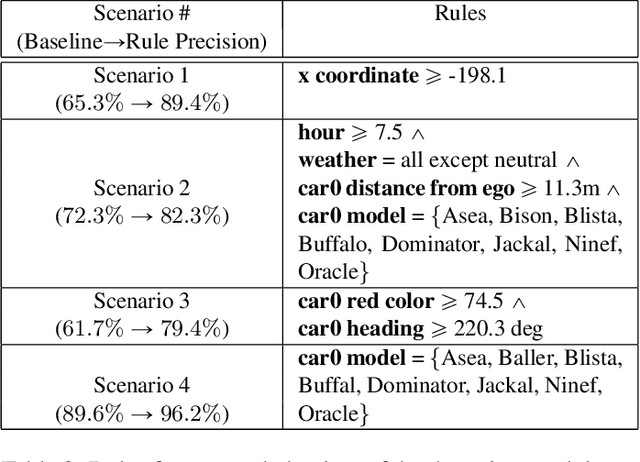
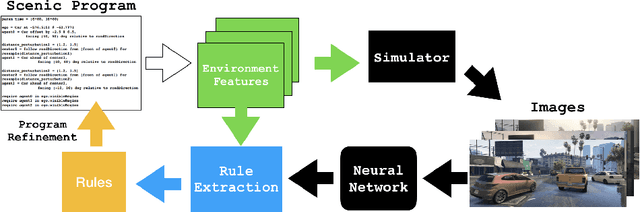
Even as deep neural networks have become very effective for tasks in vision and perception, it remains difficult to explain and debug their behavior. In this paper, we present a programmatic and semantic approach to explaining, understanding, and debugging the correct and incorrect behaviors of a neural network based perception system. Our approach is semantic in that it employs a high-level representation of the distribution of environment scenarios that the detector is intended to work on. It is programmatic in that the representation is a program in a domain-specific probabilistic programming language using which synthetic data can be generated to train and test the neural network. We present a framework that assesses the performance of the neural network to identify correct and incorrect detections, extracts rules from those results that semantically characterizes the correct and incorrect scenarios, and then specializes the probabilistic program with those rules in order to more precisely characterize the scenarios in which the neural network operates correctly or not, without human intervention to identify important features. We demonstrate our results using the SCENIC probabilistic programming language and a neural network-based object detector. Our experiments show that it is possible to automatically generate compact rules that significantly increase the correct detection rate (or conversely the incorrect detection rate) of the network and can thus help with debugging and understanding its behavior.
Finding Invariants in Deep Neural Networks
Apr 29, 2019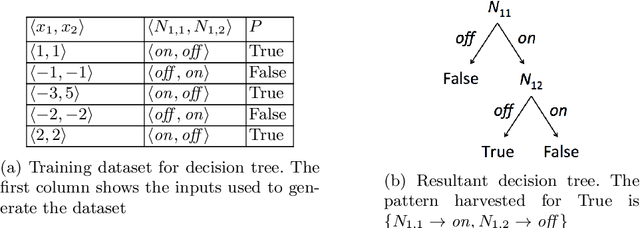
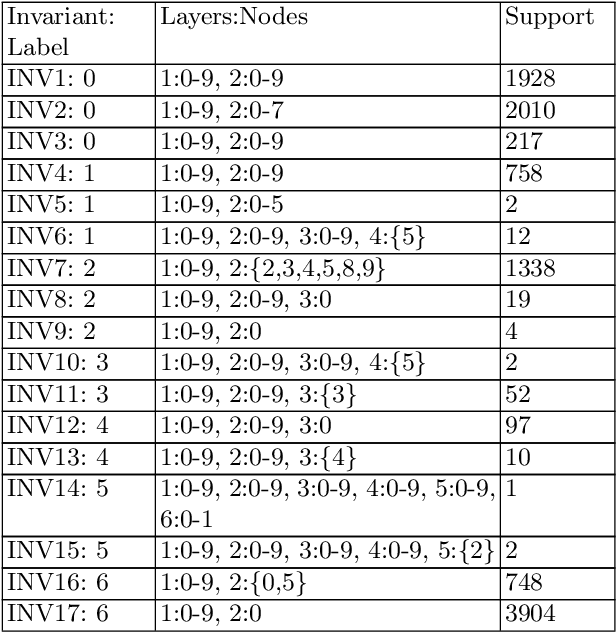
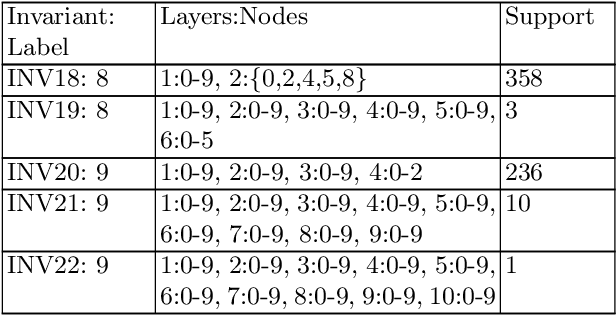
We present techniques for automatically inferring invariant properties of feed-forward neural networks. Our insight is that feed forward networks should be able to learn a decision logic that is captured in the activation patterns of its neurons. We propose to extract such decision patterns that can be considered as invariants of the network with respect to a certain output behavior. We present techniques to extract input invariants as convex predicates on the input space, and layer invariants that represent features captured in the hidden layers. We apply the techniques on the networks for the MNIST and ACASXU applications. Our experiments highlight the use of invariants in a variety of applications, such as explainability, providing robustness guarantees, detecting adversaries, simplifying proofs and network distillation.
Compositional Verification for Autonomous Systems with Deep Learning Components
Oct 18, 2018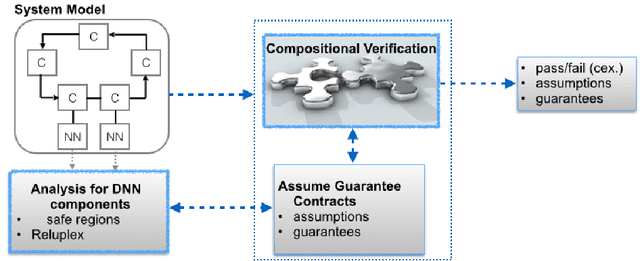
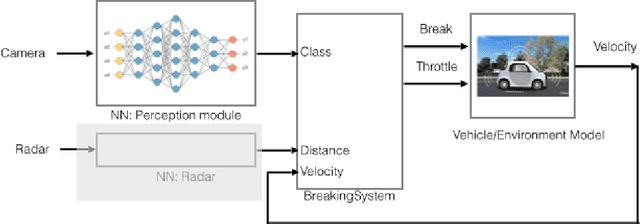
As autonomy becomes prevalent in many applications, ranging from recommendation systems to fully autonomous vehicles, there is an increased need to provide safety guarantees for such systems. The problem is difficult, as these are large, complex systems which operate in uncertain environments, requiring data-driven machine-learning components. However, learning techniques such as Deep Neural Networks, widely used today, are inherently unpredictable and lack the theoretical foundations to provide strong assurance guarantees. We present a compositional approach for the scalable, formal verification of autonomous systems that contain Deep Neural Network components. The approach uses assume-guarantee reasoning whereby {\em contracts}, encoding the input-output behavior of individual components, allow the designer to model and incorporate the behavior of the learning-enabled components working side-by-side with the other components. We illustrate the approach on an example taken from the autonomous vehicles domain.
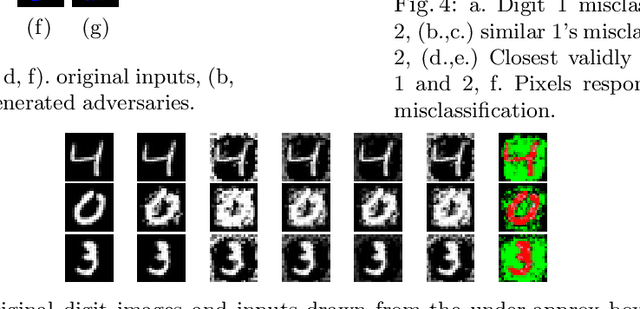
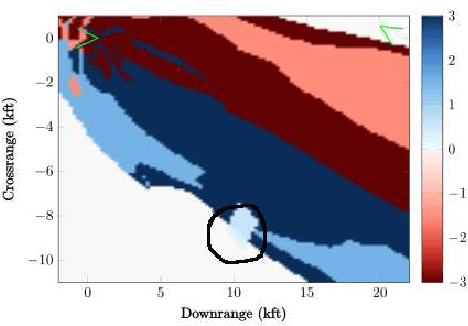
DeepSafe: A Data-driven Approach for Checking Adversarial Robustness in Neural Networks
Oct 02, 2017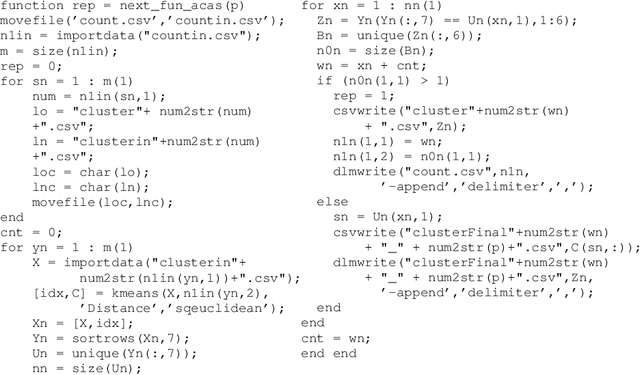
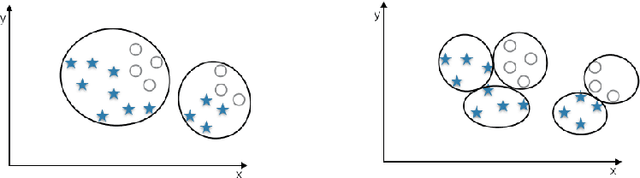
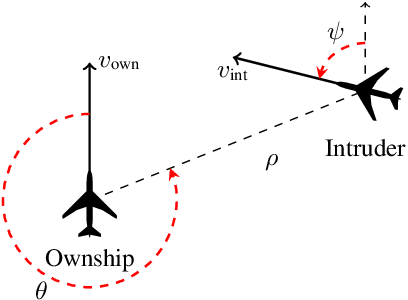

Deep neural networks have become widely used, obtaining remarkable results in domains such as computer vision, speech recognition, natural language processing, audio recognition, social network filtering, machine translation, and bio-informatics, where they have produced results comparable to human experts. However, these networks can be easily fooled by adversarial perturbations: minimal changes to correctly-classified inputs, that cause the network to mis-classify them. This phenomenon represents a concern for both safety and security, but it is currently unclear how to measure a network's robustness against such perturbations. Existing techniques are limited to checking robustness around a few individual input points, providing only very limited guarantees. We propose a novel approach for automatically identifying safe regions of the input space, within which the network is robust against adversarial perturbations. The approach is data-guided, relying on clustering to identify well-defined geometric regions as candidate safe regions. We then utilize verification techniques to confirm that these regions are safe or to provide counter-examples showing that they are not safe. We also introduce the notion of targeted robustness which, for a given target label and region, ensures that a NN does not map any input in the region to the target label. We evaluated our technique on the MNIST dataset and on a neural network implementation of a controller for the next-generation Airborne Collision Avoidance System for unmanned aircraft (ACAS Xu). For these networks, our approach identified multiple regions which were completely safe as well as some which were only safe for specific labels. It also discovered several adversarial perturbations of interest.