 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgentic Architect: An Agentic AI Framework for Architecture Design Exploration and Optimization
Apr 28, 2026Rapid advances in Large Language Models (LLMs) create new opportunities by enabling efficient exploration of broad, complex design spaces. This is particularly valuable in computer architecture, where performance depends on microarchitectural designs and policies drawn from vast combinatorial spaces. We introduce Agentic Architect, an agentic AI framework for computer architecture design exploration and optimization that combines LLM-driven code evolution with cycle-accurate simulation. The human architect specifies the optimization target, seed design, scoring function, simulator interface, and benchmark split, while the LLM explores implementations within these constraints. Across cache replacement, data prefetching, and branch prediction, Agentic Architect matches or exceeds state-of-the-art designs. Our best evolved cache replacement design achieves a 1.062x geomean IPC speedup over LRU, 0.6% over Mockingjay (1.056x). Our evolved branch predictor achieves a 1.100x geomean IPC speedup over Bimodal, 1.5% over its Hashed Perceptron seed (1.085x). Finally, our evolved prefetcher achieves a 1.76x geomean IPC speedup over no prefetching, 17% over its VA/AMPM Lite seed (1.59x) and 21% over SMS (1.55x). Our analysis surfaces several findings about agentic AI-driven microarchitecture design. Across evolved designs, components often correspond to known techniques; the novelty lies in how they are coordinated. The architect's role is shifting, but the human remains central. Seed quality bounds what search can achieve: evolution can refine and extend an existing mechanism, but cannot compensate for a weak foundation. Likewise, objectives, constraints, and prompt guidance affect reliability and generalization. Overall, Agentic Architect is the first end-to-end open-source framework for agentic AI architecture exploration and optimization.
A Scalable Multi-GPU Framework for Encrypted Large-Model Inference
Dec 12, 2025Encrypted AI using fully homomorphic encryption (FHE) provides strong privacy guarantees; but its slow performance has limited practical deployment. Recent works proposed ASICs to accelerate FHE, but require expensive advanced manufacturing processes that constrain their accessibility. GPUs are a far more accessible platform, but achieving ASIC-level performance using GPUs has remained elusive. Furthermore, state-of-the-art approaches primarily focus on small models that fit comfortably within a single device. Supporting large models such as LLMs in FHE introduces a dramatic increase in computational complexity that requires optimized GPU kernels, along with managing terabyte-scale memory footprints that far exceed the capacity of a single GPU. This paper presents Cerium, a multi-GPU framework for FHE inference on large models. Cerium integrates a domain-specific language, an optimizing compiler, and a runtime system to automatically generate high-performance GPU kernels, manage terabyte-scale memory footprints, and parallelize computation across multiple GPUs. It introduces new IR constructs, compiler passes, sparse polynomial representations, memory-efficient data layouts, and communication-aware parallelization techniques that together enable encrypted inference for models ranging from small CNNs to Llama3-8B. We build Cerium on NVIDIA GPUs and demonstrate significant performance gains. For small models, Cerium outperforms expert-written hand-optimized GPU libraries by up to 2.25 times. Cerium achieves performance competitive with state-of-the-art FHE ASICs, outright matching prior FHE ASIC CraterLake. It is the first GPU system to execute bootstrapping in under 10 milliseconds, achieving 7.5 milliseconds, and is the first to demonstrate encrypted inference for BERT-Base and Llama3-8B in 8 seconds and 134 seconds, respectively.
LithOS: An Operating System for Efficient Machine Learning on GPUs
Apr 21, 2025The surging demand for GPUs in datacenters for machine learning (ML) has made efficient GPU utilization crucial. However, meeting the diverse needs of ML models while optimizing resource usage is challenging. To enable transparent, fine-grained GPU management that maximizes utilization and energy efficiency while maintaining strong isolation, an operating system (OS) approach is needed. This paper introduces LithOS, a first step toward a GPU OS. LithOS includes the following new abstractions and mechanisms for efficient GPU resource management: (i) a novel TPC Scheduler that supports spatial scheduling at the granularity of individual TPCs, unlocking efficient TPC stealing between workloads; (ii) transparent kernel atomization to reduce head-of-line blocking and enable dynamic resource reallocation mid-execution; (iii) a lightweight hardware right-sizing mechanism that determines the minimal TPC resources needed per atom; and (iv) a transparent power management mechanism that reduces power consumption based on in-flight work behavior. We implement LithOS in Rust and evaluate its performance across extensive ML environments, comparing it to state-of-the-art solutions from NVIDIA and prior research. For inference stacking, LithOS reduces tail latencies by 13x compared to MPS; compared to the best SotA, it reduces tail latencies by 3x while improving aggregate throughput by 1.6x. In hybrid inference-training stacking, LithOS reduces tail latencies by 4.7x compared to MPS; compared to the best SotA, it reduces tail latencies 1.18x while improving aggregate throughput by 1.35x. Finally, for a modest performance hit under 4%, LithOS's right-sizing provides a quarter of GPU capacity savings on average, while for a 7% hit, its power management yields a quarter of a GPU's energy savings. Overall, LithOS increases GPU efficiency, establishing a foundation for future OS research on GPUs.
High-resolution optical and acoustic remote sensing datasets of the Puck Lagoon, Southern Baltic
Nov 13, 2024The very shallow marine basin of Puck Lagoon in the southern Baltic Sea, on the Northern coast of Poland, hosts valuable benthic habitats and cultural heritage sites. These include, among others, protected Zostera marina meadows, one of the Baltic's major medieval harbours, a ship graveyard, and likely other submerged features that are yet to be discovered. Prior to this project, no comprehensive high-resolution remote sensing data were available for this area. This article describes the first Digital Elevation Models (DEMs) derived from a combination of airborne bathymetric LiDAR, multibeam echosounder, airborne photogrammetry and satellite imagery. These datasets also include multibeam echosounder backscatter and LiDAR intensity, allowing determination of the character and properties of the seafloor. Combined, these datasets are a vital resource for assessing and understanding seafloor morphology, benthic habitats, cultural heritage, and submerged landscapes. Given the significance of Puck Lagoon's hydrographical, ecological, geological, and archaeological environs, the high-resolution bathymetry, acquired by our project, can provide the foundation for sustainable management and informed decision-making for this area of interest.
MagicBathyNet: A Multimodal Remote Sensing Dataset for Bathymetry Prediction and Pixel-based Classification in Shallow Waters
May 24, 2024



Accurate, detailed, and high-frequent bathymetry, coupled with complex semantic content, is crucial for the undermapped shallow seabed areas facing intense climatological and anthropogenic pressures. Current methods exploiting remote sensing images to derive bathymetry or seabed classes mainly exploit non-open data. This lack of openly accessible benchmark archives prevents the wider use of deep learning methods in such applications. To address this issue, in this paper we present the MagicBathyNet, which is a benchmark dataset made up of image patches of Sentinel2, SPOT-6 and aerial imagery, bathymetry in raster format and annotations of seabed classes. MagicBathyNet is then exploited to benchmark state-of-the-art methods in learning-based bathymetry and pixel-based classification. Dataset, pre-trained weights, and code are publicly available at www.magicbathy.eu/magicbathynet.html.
Image-based underwater 3D reconstruction for Cultural Heritage: from image collection to 3D. Critical steps and considerations
Oct 02, 2020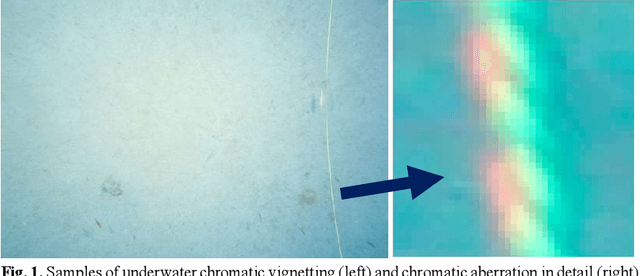
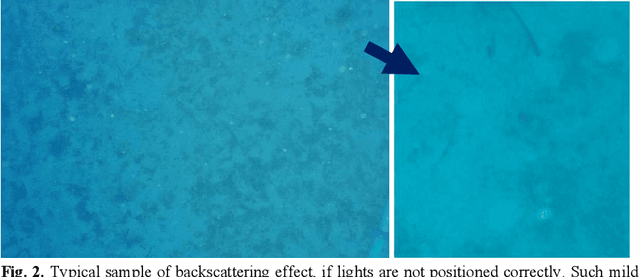
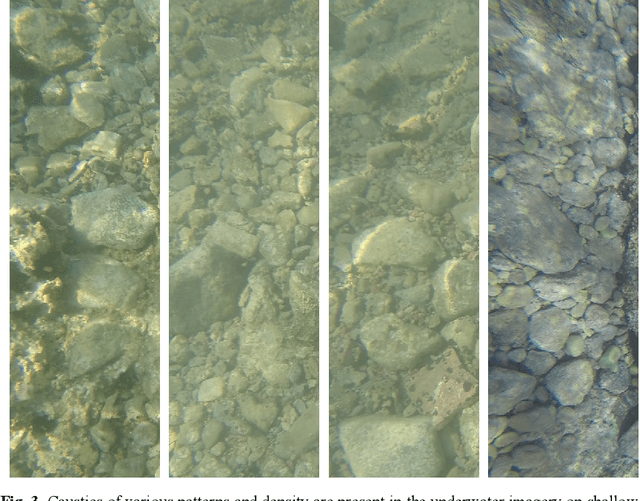
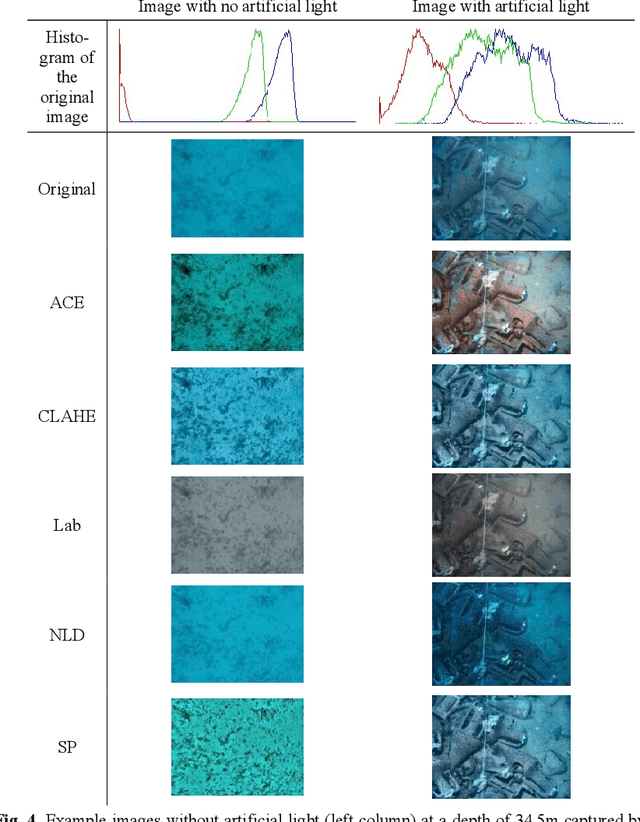
Underwater Cultural Heritage (CH) sites are widely spread; from ruins in coastlines up to shipwrecks in deep. The documentation and preservation of this heritage is an obligation of the mankind, dictated also by the international treaties like the Convention on the Protection of the Underwater Cultural Her-itage which fosters the use of "non-destructive techniques and survey meth-ods in preference over the recovery of objects". However, submerged CH lacks in protection and monitoring in regards to the land CH and nowadays recording and documenting, for digital preservation as well as dissemination through VR to wide public, is of most importance. At the same time, it is most difficult to document it, due to inherent restrictions posed by the environ-ment. In order to create high detailed textured 3D models, optical sensors and photogrammetric techniques seems to be the best solution. This chapter dis-cusses critical aspects of all phases of image based underwater 3D reconstruc-tion process, from data acquisition and data preparation using colour restora-tion and colour enhancement algorithms to Structure from Motion (SfM) and Multi-View Stereo (MVS) techniques to produce an accurate, precise and complete 3D model for a number of applications.
Shallow Water Bathymetry Mapping from UAV Imagery based on Machine Learning
Feb 27, 2019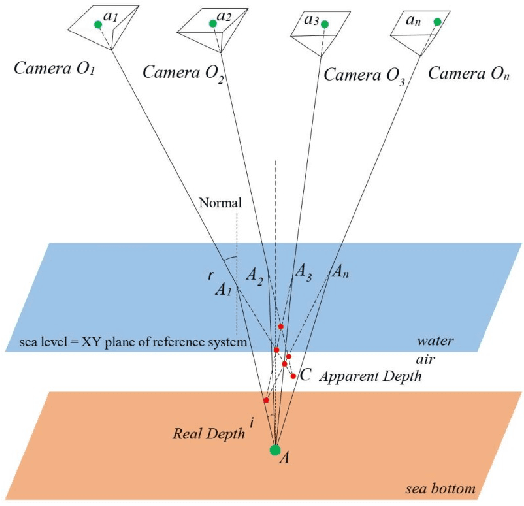
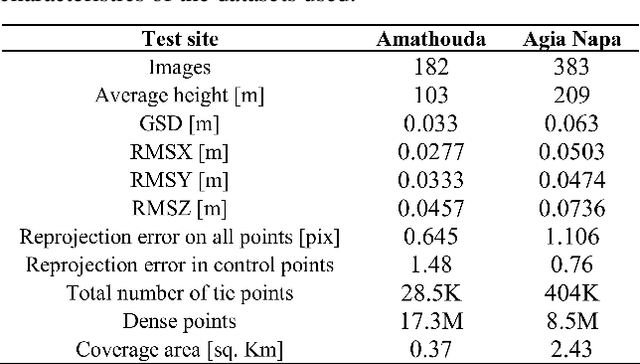
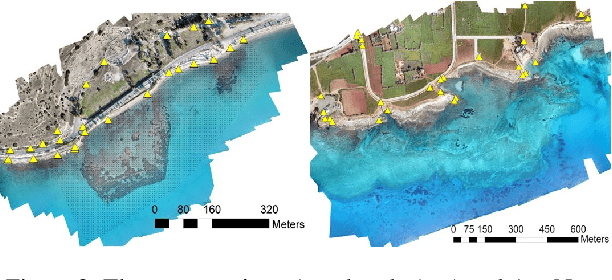
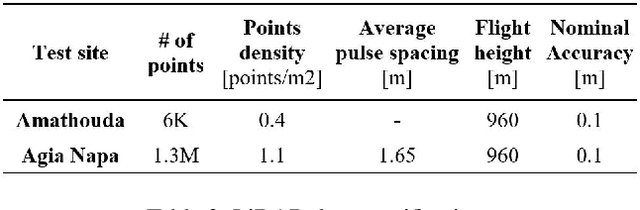
The determination of accurate bathymetric information is a key element for near offshore activities, hydrological studies such as coastal engineering applications, sedimentary processes, hydrographic surveying as well as archaeological mapping and biological research. UAV imagery processed with Structure from Motion (SfM) and Multi View Stereo (MVS) techniques can provide a low-cost alternative to established shallow seabed mapping techniques offering as well the important visual information. Nevertheless, water refraction poses significant challenges on depth determination. Till now, this problem has been addressed through customized image-based refraction correction algorithms or by modifying the collinearity equation. In this paper, in order to overcome the water refraction errors, we employ machine learning tools that are able to learn the systematic underestimation of the estimated depths. In the proposed approach, based on known depth observations from bathymetric LiDAR surveys, an SVR model was developed able to estimate more accurately the real depths of point clouds derived from SfM-MVS procedures. Experimental results over two test sites along with the performed quantitative validation indicated the high potential of the developed approach.