 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGazePrior: Zero-Shot AR/VR Eye Tracking via Learned 3D Gaze Reconstruction
May 21, 2026Eye tracking (ET) is a foundational technology for advanced AR/VR applications. However, training ET models for every new ET device is challenging: real data collection is costly and time-consuming, while existing synthetic data generation methods lack realism. To remove the need for additional data collection while maintaining data quality, we introduce a data-driven 3D prior that models the distribution of human eyes across diverse identities, gaze directions, and light settings. This model, which we coin GazePrior, then enables sparse-input 3D reconstruction of annotated data collected with previous ET devices, which can in turn be rendered from the cameras of any target ET device. Our approach synthesizes data with the realism, diversity and ground-truth accuracy of real data collection without its prohibitive costs. Our experiments demonstrate that ET models trained with our synthesized data outperform previous zero-shot methods, achieving higher accuracy and robustness.
Rapidly deploying on-device eye tracking by distilling visual foundation models
Apr 02, 2026Eye tracking (ET) plays a critical role in augmented and virtual reality applications. However, rapidly deploying high-accuracy, on-device gaze estimation for new products remains challenging because hardware configurations (e.g., camera placement, camera pose, and illumination) often change across device generations. Visual foundation models (VFMs) are a promising direction for rapid training and deployment, and they excel on natural-image benchmarks; yet we find that off-the-shelf VFMs still struggle to achieve high accuracy on specialized near-eye infrared imagery. To address this gap, we introduce DistillGaze, a framework that distills a foundation model by leveraging labeled synthetic data and unlabeled real data for rapid and high-performance on-device gaze estimation. DistillGaze proceeds in two stages. First, we adapt a VFM into a domain-specialized teacher using self-supervised learning on labeled synthetic and unlabeled real images. Synthetic data provides scalable, high-quality gaze supervision, while unlabeled real data helps bridge the synthetic-to-real domain gap. Second, we train an on-device student using both teacher guidance and self-training. Evaluated on a large-scale, crowd-sourced dataset spanning over 2,000 participants, DistillGaze reduces median gaze error by 58.62% relative to synthetic-only baselines while maintaining a lightweight 256K-parameter model suitable for real-time on-device deployment. Overall, DistillGaze provides an efficient pathway for training and deploying ET models that adapt to hardware changes, and offers a recipe for combining synthetic supervision with unlabeled real data in on-device regression tasks.
Characterization and Thermal Management of a DC Motor-Driven Resonant Actuator for Miniature Mobile Robots with Oscillating Limbs
Jan 24, 2020
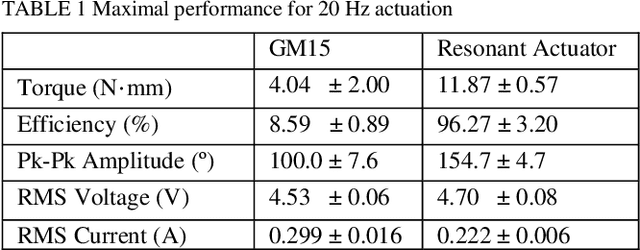
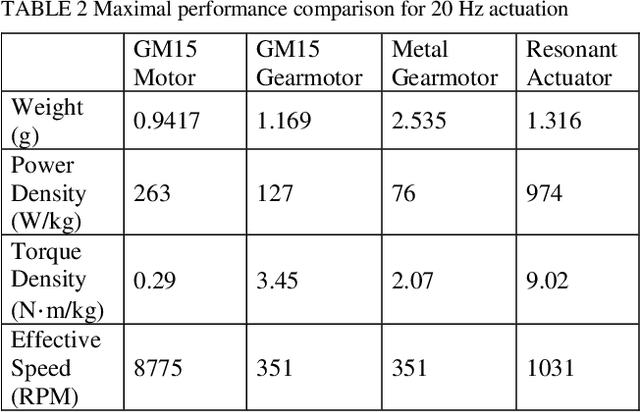
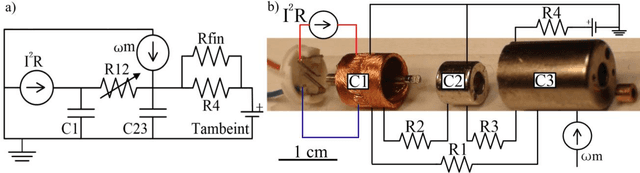
In this paper, we characterize the performance of and develop thermal management solutions for a DC motor-driven resonant actuator developed for flapping wing micro air vehicles. The actuator, a DC micro-gearmotor connected in parallel with a torsional spring, drives reciprocal wing motion. Compared to the gearmotor alone, this design increased torque and power density by 161.1% and 666.8%, respectively, while decreasing the drawn current by 25.8%. Characterization of the actuator, isolated from nonlinear aerodynamic loading, results in standard metrics directly comparable to other actuators. The micro-motor, selected for low weight considerations, operates at high power for limited duration due to thermal effects. To predict system performance, a lumped parameter thermal circuit model was developed. Critical model parameters for this micro-motor, two orders of magnitude smaller than those previously characterized, were identified experimentally. This included the effects of variable winding resistance, bushing friction, speed-dependent forced convection, and the addition of a heatsink. The model was then used to determine a safe operation envelope for the vehicle and to design a weight-optimal heatsink. This actuator design and thermal modeling approach could be applied more generally to improve the performance of any miniature mobile robot or device with motor-driven oscillating limbs or loads.
Bio-inspired Flexible Twisting Wings Increase Lift and Efficiency of a Flapping Wing Micro Air Vehicle
Jan 24, 2020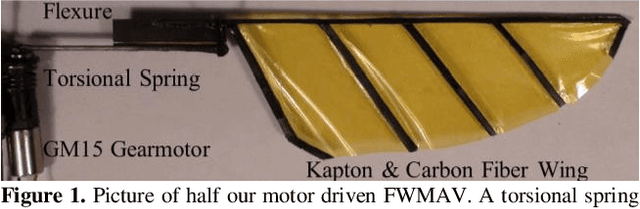
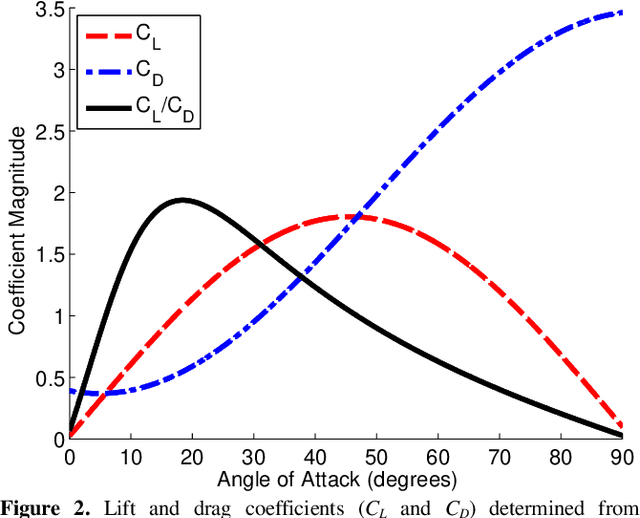
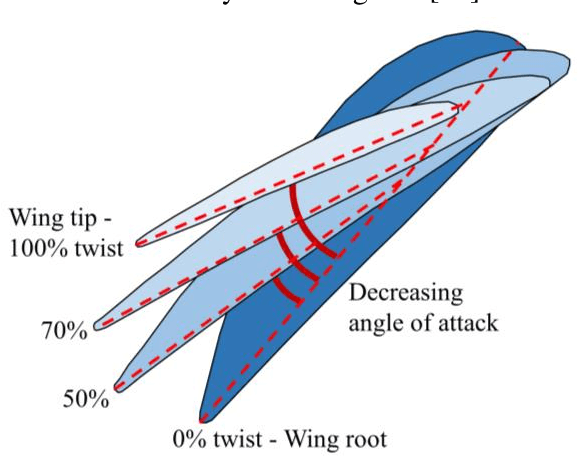
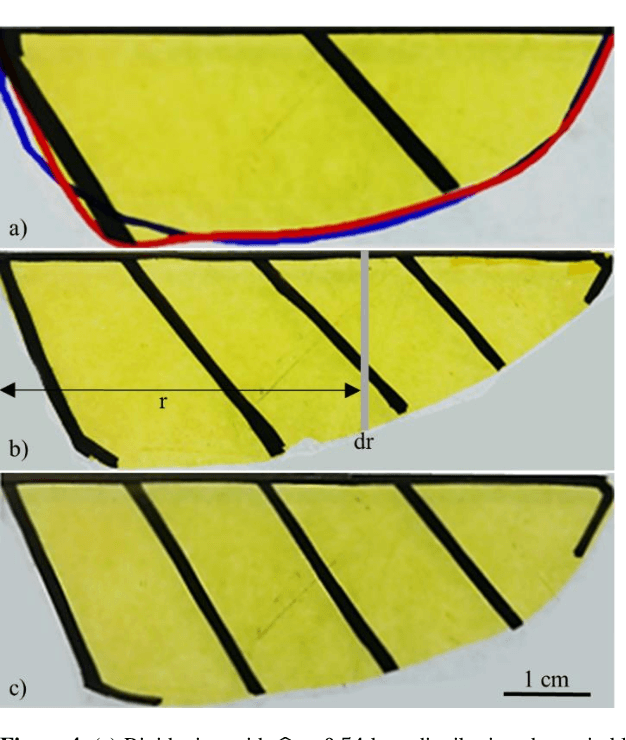
We investigate the effect of wing twist flexibility on lift and efficiency of a flapping-wing micro air vehicle capable of liftoff. Wings used previously were chosen to be fully rigid due to modeling and fabrication constraints. However, biological wings are highly flexible and other micro air vehicles have successfully utilized flexible wing structures for specialized tasks. The goal of our study is to determine if dynamic twisting of flexible wings can increase overall aerodynamic lift and efficiency. A flexible twisting wing design was found to increase aerodynamic efficiency by 41.3%, translational lift production by 35.3%, and the effective lift coefficient by 63.7% compared to the rigid-wing design. These results exceed the predictions of quasi-steady blade element models, indicating the need for unsteady computational fluid dynamics simulations of twisted flapping wings.