 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Fault-Tolerant Space Computing: Guidance Navigation and Control (GNC) and Landing Vision System (LVS) Implementations on Next-Gen Multi-Core Processors
Nov 06, 2025Future planetary exploration missions demand high-performance, fault-tolerant computing to enable autonomous Guidance, Navigation, and Control (GNC) and Lander Vision System (LVS) operations during Entry, Descent, and Landing (EDL). This paper evaluates the deployment of GNC and LVS algorithms on next-generation multi-core processors--HPSC, Snapdragon VOXL2, and AMD Xilinx Versal--demonstrating up to 15x speedup for LVS image processing and over 250x speedup for Guidance for Fuel-Optimal Large Divert (GFOLD) trajectory optimization compared to legacy spaceflight hardware. To ensure computational reliability, we present ARBITER (Asynchronous Redundant Behavior Inspection for Trusted Execution and Recovery), a Multi-Core Voting (MV) mechanism that performs real-time fault detection and correction across redundant cores. ARBITER is validated in both static optimization tasks (GFOLD) and dynamic closed-loop control (Attitude Control System). A fault injection study further identifies the gradient computation stage in GFOLD as the most sensitive to bit-level errors, motivating selective protection strategies and vector-based output arbitration. This work establishes a scalable and energy-efficient architecture for future missions, including Mars Sample Return, Enceladus Orbilander, and Ceres Sample Return, where onboard autonomy, low latency, and fault resilience are critical.
Mid-Air Helicopter Delivery at Mars Using a Jetpack
Mar 07, 2022
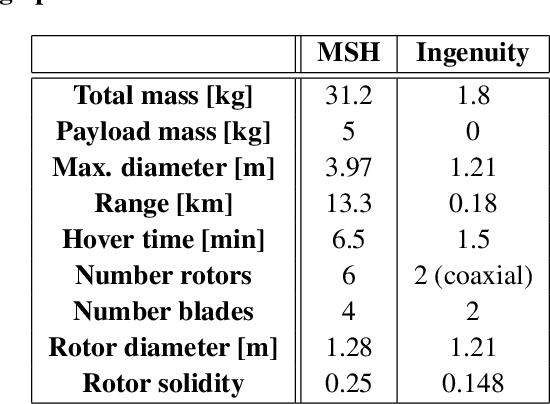
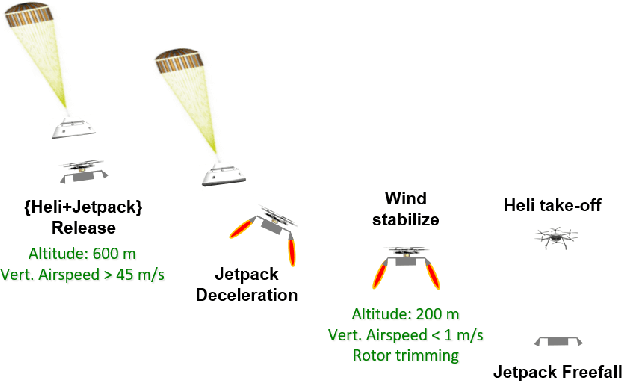
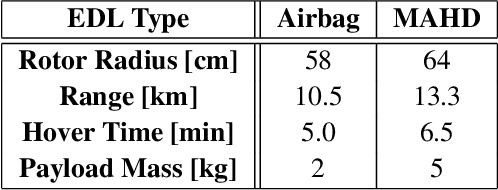
Mid-Air Helicopter Delivery (MAHD) is a new Entry, Descent and Landing (EDL) architecture to enable in situ mobility for Mars science at lower cost than previous missions. It uses a jetpack to slow down a Mars Science Helicopter (MSH) after separation from the backshell, and reach aerodynamic conditions suitable for helicopter take-off in mid air. For given aeroshell dimensions, only MAHD's lander-free approach leaves enough room in the aeroshell to accommodate the largest rotor option for MSH. This drastically improves flight performance, notably allowing +150\% increased science payload mass. Compared to heritage EDL approaches, the simpler MAHD architecture is also likely to reduce cost, and enables access to more hazardous and higher-elevation terrains on Mars. This paper introduces a design for the MAHD system architecture and operations. We present a mechanical configuration that fits both MSH and the jetpack within the 2.65-m Mars heritage aeroshell, and a jetpack control architecture which fully leverages the available helicopter avionics. We discuss preliminary numerical models of the flow dynamics resulting from the interaction between the jets, the rotors and the side winds. We define a force-torque sensing architecture capable of handling the wind and trimming the rotors to prepare for safe take-off. Finally, we analyze the dynamic environment and closed-loop control simulation results to demonstrate the preliminary feasibility of MAHD.