 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmallSatSim: A High-Fidelity Simulation and Training Toolkit for Microgravity Robotic Close Proximity Operations
Mar 15, 2026Microgravity rendezvous and close proximity operations (RPO) is a growing area of interest for applications spanning in-space assembly and manufacturing (ISAM), orbital debris remediation, and small body exploration. Microgravity environments present unique challenges for robotic control and planning algorithms for new agile RPO mission scenarios like free-floating manipulation, planning under failure, and estimating high-fidelity dynamics of tumbling bodies. To facilitate the development and testing of novel RPO algorithms, we introduce SmallSatSim, a high-fidelity simulation toolkit that leverages the MuJoCo physics engine to accurately model small satellite RPO dynamics in local microgravity robotic free-flight settings, including under model disturbances and perturbations. The framework includes cutting edge out-of-the-box free-flyer control techniques. A GPU-accelerated pipeline using MuJoCo MJX and JAX is implemented for sampling- and learning-based simulation uses cases. SmallSatSim also supports configurable failure models, enabling the evaluation of safe control strategies under adversarial conditions. Visualization, logging, and GPU-enabled parallelization further enhance SmallSatSim's capability for RPO testing. We outline SmallSatSim's features and intended use cases, and demonstrate its use for robotic RPO planning and control. The open-sourced toolkit aims to accelerate research in autonomous, agile robotic small satellite operations.
Mid-Air Helicopter Delivery at Mars Using a Jetpack
Mar 07, 2022
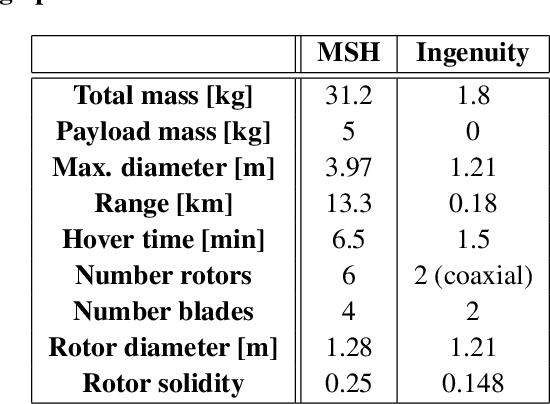
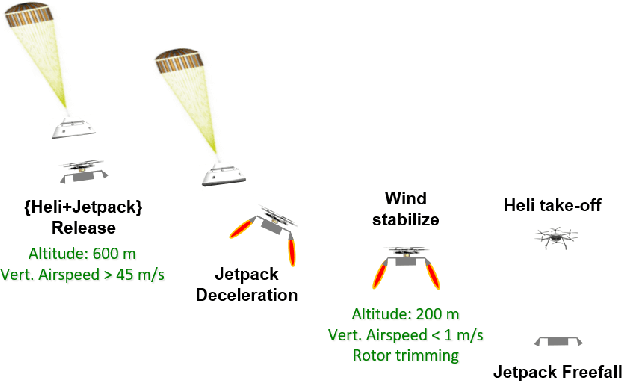
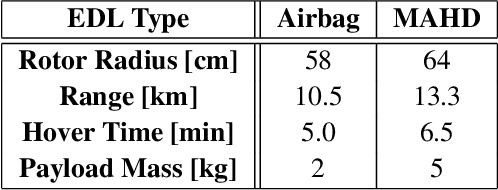
Mid-Air Helicopter Delivery (MAHD) is a new Entry, Descent and Landing (EDL) architecture to enable in situ mobility for Mars science at lower cost than previous missions. It uses a jetpack to slow down a Mars Science Helicopter (MSH) after separation from the backshell, and reach aerodynamic conditions suitable for helicopter take-off in mid air. For given aeroshell dimensions, only MAHD's lander-free approach leaves enough room in the aeroshell to accommodate the largest rotor option for MSH. This drastically improves flight performance, notably allowing +150\% increased science payload mass. Compared to heritage EDL approaches, the simpler MAHD architecture is also likely to reduce cost, and enables access to more hazardous and higher-elevation terrains on Mars. This paper introduces a design for the MAHD system architecture and operations. We present a mechanical configuration that fits both MSH and the jetpack within the 2.65-m Mars heritage aeroshell, and a jetpack control architecture which fully leverages the available helicopter avionics. We discuss preliminary numerical models of the flow dynamics resulting from the interaction between the jets, the rotors and the side winds. We define a force-torque sensing architecture capable of handling the wind and trimming the rotors to prepare for safe take-off. Finally, we analyze the dynamic environment and closed-loop control simulation results to demonstrate the preliminary feasibility of MAHD.