 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Cross-Country Data Acquisition Strategy for ADAS via Street-View Imagery
Feb 02, 2026Deploying ADAS and ADS across countries remains challenging due to differences in legislation, traffic infrastructure, and visual conventions, which introduce domain shifts that degrade perception performance. Traditional cross-country data collection relies on extensive on-road driving, making it costly and inefficient to identify representative locations. To address this, we propose a street-view-guided data acquisition strategy that leverages publicly available imagery to identify places of interest (POI). Two POI scoring methods are introduced: a KNN-based feature distance approach using a vision foundation model, and a visual-attribution approach using a vision-language model. To enable repeatable evaluation, we adopt a collect-detect protocol and construct a co-located dataset by pairing the Zenseact Open Dataset with Mapillary street-view images. Experiments on traffic sign detection, a task particularly sensitive to cross-country variations in sign appearance, show that our approach achieves performance comparable to random sampling while using only half of the target-domain data. We further provide cost estimations for full-country analysis, demonstrating that large-scale street-view processing remains economically feasible. These results highlight the potential of street-view-guided data acquisition for efficient and cost-effective cross-country model adaptation.
TPK: Trustworthy Trajectory Prediction Integrating Prior Knowledge For Interpretability and Kinematic Feasibility
May 10, 2025



Trajectory prediction is crucial for autonomous driving, enabling vehicles to navigate safely by anticipating the movements of surrounding road users. However, current deep learning models often lack trustworthiness as their predictions can be physically infeasible and illogical to humans. To make predictions more trustworthy, recent research has incorporated prior knowledge, like the social force model for modeling interactions and kinematic models for physical realism. However, these approaches focus on priors that suit either vehicles or pedestrians and do not generalize to traffic with mixed agent classes. We propose incorporating interaction and kinematic priors of all agent classes--vehicles, pedestrians, and cyclists with class-specific interaction layers to capture agent behavioral differences. To improve the interpretability of the agent interactions, we introduce DG-SFM, a rule-based interaction importance score that guides the interaction layer. To ensure physically feasible predictions, we proposed suitable kinematic models for all agent classes with a novel pedestrian kinematic model. We benchmark our approach on the Argoverse 2 dataset, using the state-of-the-art transformer HPTR as our baseline. Experiments demonstrate that our method improves interaction interpretability, revealing a correlation between incorrect predictions and divergence from our interaction prior. Even though incorporating the kinematic models causes a slight decrease in accuracy, they eliminate infeasible trajectories found in the dataset and the baseline model. Thus, our approach fosters trust in trajectory prediction as its interaction reasoning is interpretable, and its predictions adhere to physics.
Boundary-Guided Trajectory Prediction for Road Aware and Physically Feasible Autonomous Driving
May 10, 2025



Accurate prediction of surrounding road users' trajectories is essential for safe and efficient autonomous driving. While deep learning models have improved performance, challenges remain in preventing off-road predictions and ensuring kinematic feasibility. Existing methods incorporate road-awareness modules and enforce kinematic constraints but lack plausibility guarantees and often introduce trade-offs in complexity and flexibility. This paper proposes a novel framework that formulates trajectory prediction as a constrained regression guided by permissible driving directions and their boundaries. Using the agent's current state and an HD map, our approach defines the valid boundaries and ensures on-road predictions by training the network to learn superimposed paths between left and right boundary polylines. To guarantee feasibility, the model predicts acceleration profiles that determine the vehicle's travel distance along these paths while adhering to kinematic constraints. We evaluate our approach on the Argoverse-2 dataset against the HPTR baseline. Our approach shows a slight decrease in benchmark metrics compared to HPTR but notably improves final displacement error and eliminates infeasible trajectories. Moreover, the proposed approach has superior generalization to less prevalent maneuvers and unseen out-of-distribution scenarios, reducing the off-road rate under adversarial attacks from 66\% to just 1\%. These results highlight the effectiveness of our approach in generating feasible and robust predictions.
Sample-Specific Output Constraints for Neural Networks
Mar 23, 2020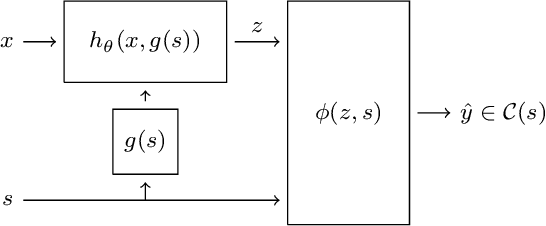
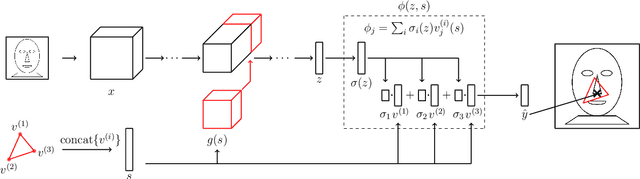
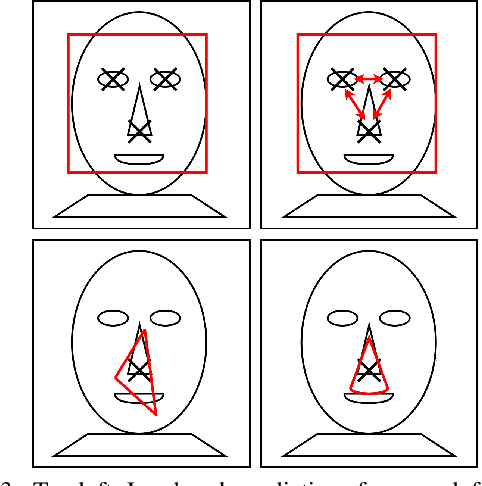
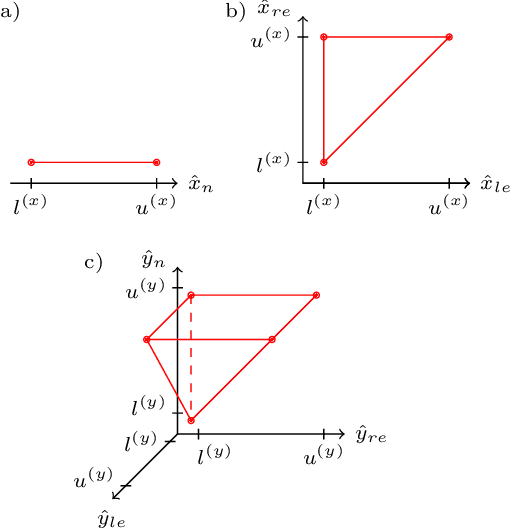
Neural networks reach state-of-the-art performance in a variety of learning tasks. However, a lack of understanding the decision making process yields to an appearance as black box. We address this and propose ConstraintNet, a neural network with the capability to constrain the output space in each forward pass via an additional input. The prediction of ConstraintNet is proven within the specified domain. This enables ConstraintNet to exclude unintended or even hazardous outputs explicitly whereas the final prediction is still learned from data. We focus on constraints in form of convex polytopes and show the generalization to further classes of constraints. ConstraintNet can be constructed easily by modifying existing neural network architectures. We highlight that ConstraintNet is end-to-end trainable with no overhead in the forward and backward pass. For illustration purposes, we model ConstraintNet by modifying a CNN and construct constraints for facial landmark prediction tasks. Furthermore, we demonstrate the application to a follow object controller for vehicles as a safety-critical application. We submitted an approach and system for the generation of safety-critical outputs of an entity based on ConstraintNet at the German Patent and Trademark Office with the official registration mark DE10 2019 119 739.