 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovery and Deployment of Emergent Robot Swarm Behaviors via Representation Learning and Real2Sim2Real Transfer
Feb 21, 2025



Given a swarm of limited-capability robots, we seek to automatically discover the set of possible emergent behaviors. Prior approaches to behavior discovery rely on human feedback or hand-crafted behavior metrics to represent and evolve behaviors and only discover behaviors in simulation, without testing or considering the deployment of these new behaviors on real robot swarms. In this work, we present Real2Sim2Real Behavior Discovery via Self-Supervised Representation Learning, which combines representation learning and novelty search to discover possible emergent behaviors automatically in simulation and enable direct controller transfer to real robots. First, we evaluate our method in simulation and show that our proposed self-supervised representation learning approach outperforms previous hand-crafted metrics by more accurately representing the space of possible emergent behaviors. Then, we address the reality gap by incorporating recent work in sim2real transfer for swarms into our lightweight simulator design, enabling direct robot deployment of all behaviors discovered in simulation on an open-source and low-cost robot platform.
Empirical Study of Ceiling Proximity Effects and Electrostatic Adhesion for Small-scale Electroaerodynamic Thrusters
Oct 25, 2024



Electroaerodynamic propulsion, where force is produced via the momentum-transferring collisions between accelerated ions and neutral air molecules, is a promising alternative mechanism for flight at the micro air vehicle scale due to its silent and solid-state nature. Its relatively low efficiency, however, has thus far precluded its use in a power-autonomous vehicle; leveraging the efficiency benefits of operation close to a fixed surface is a potential solution. While proximity effects like the ground and ceiling effects have been well-investigated for rotorcraft and flapping wing micro air vehicles, they have not been for electroaerodynamically-propelled fliers. In this work, we investigate the change in performance when centimeter-scale thrusters are operated close to a "ceiling" plane about the inlet. We show a surprising and, until now, unreported effect; a major electrostatic attractive component, analogous to electroadhesive pressure but instead mediated by a stable atmospheric plasma. The isolated electrostatic and fluid dynamic components of the ceiling effect are shown for different distances from the plane and for different materials. We further show that a flange attached to the inlet can vastly increase both components of force. A peak efficiency improvement of 600% is shown close to the ceiling. This work points the way towards effective use of the ceiling effect for power autonomous vehicles, extending flight duration, or as a perching mechanism.
Empirical Study of Ground Proximity Effects for Small-scale Electroaerodynamic Thrusters
Sep 19, 2023



Electroaerodynamic (EAD) propulsion, where thrust is produced by collisions between electrostatically-accelerated ions and neutral air, is a potentially transformative method for indoor flight owing to its silent and solid-state nature. Like rotors, EAD thrusters exhibit changes in performance based on proximity to surfaces. Unlike rotors, they have no fragile and quickly spinning parts that have to avoid those surfaces; taking advantage of the efficiency benefits from proximity effects may be a route towards longer-duration indoor operation of ion-propelled fliers. This work presents the first empirical study of ground proximity effects for EAD propulsors, both individually and as quad-thruster arrays. It focuses on multi-stage ducted centimeter-scale actuators suitable for use on small robots envisioned for deployment in human-proximal and indoor environments. Three specific effects (ground, suckdown, and fountain lift), each occurring with a different magnitude at a different spacing from the ground plane, are investigated and shown to have strong dependencies on geometric parameters including thruster-to-thruster spacing, thruster protrusion from the fuselage, and inclusion of flanges or strakes. Peak thrust enhancement ranging from 300 to 600% is found for certain configurations operated in close proximity (0.2 mm) to the ground plane and as much as a 20% increase is measured even when operated centimeters away.
High Aspect Ratio Multi-stage Ducted Electroaerodynamic Thrusters for Micro Air Vehicle Propulsion
Aug 18, 2023



Electroaerodynamic propulsion, where force is produced through collisions between electrostatically accelerated ions and neutral air molecules, is an attractive alternative to propeller- and flapping wing-based methods for micro air vehicle (MAV) flight due to its silent and solid-state nature. One major barrier to adoption is its limited thrust efficiency at useful disk loading levels. Ducted actuators comprising multiple serially-integrated acceleration stages are a potential solution, allowing individual stages to operate at higher efficiency while maintaining a useful total thrust, and potentially improving efficiency through various aerodynamic and fluid dynamic mechanisms. In this work, we investigate the effects of duct and emitter electrode geometries on actuator performance, then show how a combination of increasing cross-sectional aspect ratio and serial integration of multiple stages can be used to produce overall thrust densities comparable to commercial propulsors. An optimized five-stage device attains a thrust density of about 18 N/m$^2$ at a thrust efficiency of about 2 mN/W, among the highest values ever measured at this scale. We further show how this type of thruster can be integrated under the wings of a MAV-scale fixed wing platform, pointing towards future use as a distributed propulsion system.
Toward a Millimeter-Scale Tendon-Driven Continuum Wrist with Integrated Gripper for Microsurgical Applications
Feb 14, 2023Microsurgery is a particularly impactful yet challenging form of surgery. Robot assisted microsurgery has the potential to improve surgical dexterity and enable precise operation on such small scales in ways not previously possible. Intraocular microsurgery is a particularly challenging domain in part due to the lack of dexterity that is achievable with rigid instruments inserted through the eye. In this work, we present a new design for a millimeter-scale, dexterous wrist intended for microsurgery applications. The wrist is created via a state-of-the-art two-photon-polymerization (2PP) microfabrication technique, enabling the wrist to be constructed of flexible material with complex internal geometries and critical features at the micron-scale. The wrist features a square cross section with side length of 1.25 mm and total length of 3.75 mm. The wrist has three tendons routed down its length which, when actuated by small-scale linear actuators, enable bending in any plane. We present an integrated gripper actuated by a fourth tendon routed down the center of the robot. We evaluate the wrist and gripper by characterizing its bend-angle. We achieve more than 90 degrees bending in both axes. We demonstrate out of plane bending as well as the robot's ability to grip while actuated. Our integrated gripper/tendon-driven continuum robot design and meso-scale assembly techniques have the potential to enable small-scale wrists with more dexterity than has been previously demonstrated. Such a wrist could improve surgeon capabilities during teleoperation with the potential to improve patient outcomes in a variety of surgical applications, including intraocular surgery.
Low Level Control of a Quadrotor with Deep Model-Based Reinforcement learning
Jan 11, 2019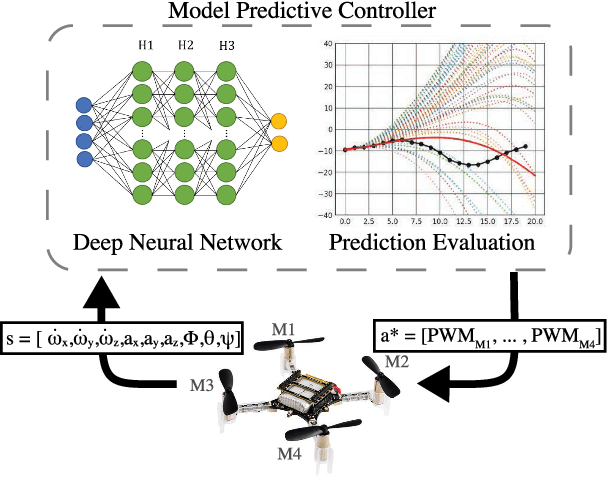
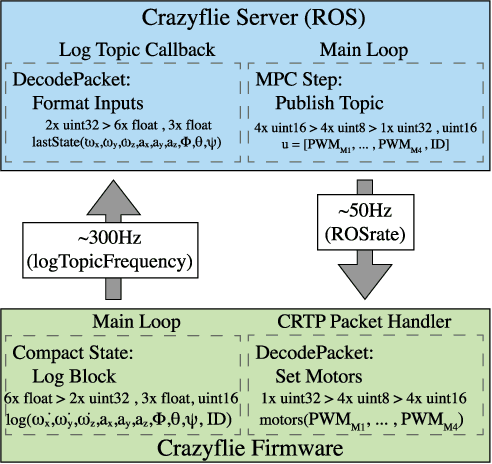
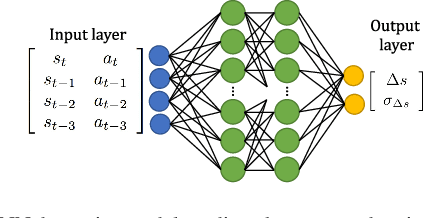
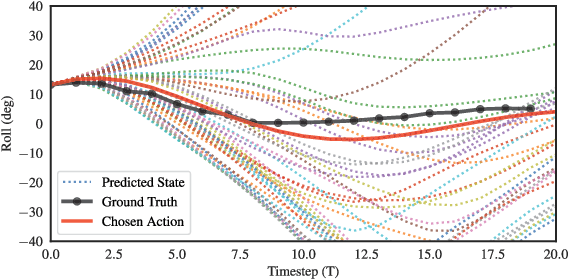
Generating low-level robot controllers often requires manual parameters tuning and significant system knowledge, which can result in long design times for highly specialized controllers. With the growth of automation, the need for such controllers might grow faster than the number of expert designers. To address the problem of rapidly generating low-level controllers without domain knowledge, we propose using model-based reinforcement learning (MBRL) trained on few minutes of automatically generated data. In this paper, we explore the capabilities of MBRL on a Crazyflie quadrotor with rapid dynamics where existing classical control schemes offer a baseline against the new method's performance. To our knowledge, this is the first use of MBRL for low-level controlled hover of a quadrotor using only on-board sensors, direct motor input signals, and no initial dynamics knowledge. Our forward dynamics model for prediction is a neural network tuned to predict the state variables at the next time step, with a regularization term on the variance of predictions. The model predictive controller then transmits best actions from a GPU-enabled base station to the quadrotor firmware via radio. In our experiments, the quadrotor achieved hovering capability of up to 6 seconds with 3 minutes of experimental training data.