 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMorphogenetic Assembly and Adaptive Control for Heterogeneous Modular Robots
Feb 11, 2026This paper presents a closed-loop automation framework for heterogeneous modular robots, covering the full pipeline from morphological construction to adaptive control. In this framework, a mobile manipulator handles heterogeneous functional modules including structural, joint, and wheeled modules to dynamically assemble diverse robot configurations and provide them with immediate locomotion capability. To address the state-space explosion in large-scale heterogeneous reconfiguration, we propose a hierarchical planner: the high-level planner uses a bidirectional heuristic search with type-penalty terms to generate module-handling sequences, while the low level planner employs A* search to compute optimal execution trajectories. This design effectively decouples discrete configuration planning from continuous motion execution. For adaptive motion generation of unknown assembled configurations, we introduce a GPU accelerated Annealing-Variance Model Predictive Path Integral (MPPI) controller. By incorporating a multi stage variance annealing strategy to balance global exploration and local convergence, the controller enables configuration-agnostic, real-time motion control. Large scale simulations show that the type-penalty term is critical for planning robustness in heterogeneous scenarios. Moreover, the greedy heuristic produces plans with lower physical execution costs than the Hungarian heuristic. The proposed annealing-variance MPPI significantly outperforms standard MPPI in both velocity tracking accuracy and control frequency, achieving real time control at 50 Hz. The framework validates the full-cycle process, including module assembly, robot merging and splitting, and dynamic motion generation.
Capped norm linear discriminant analysis and its applications
Nov 04, 2020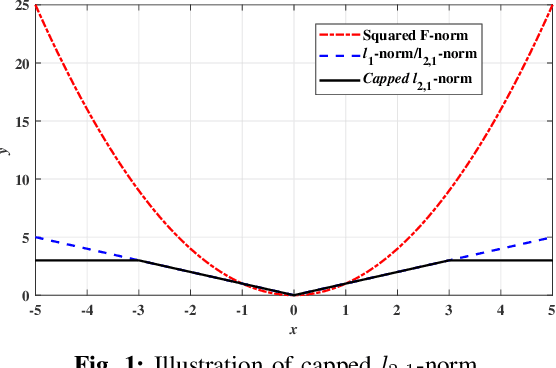
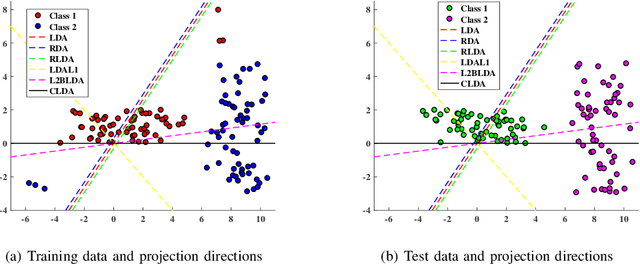
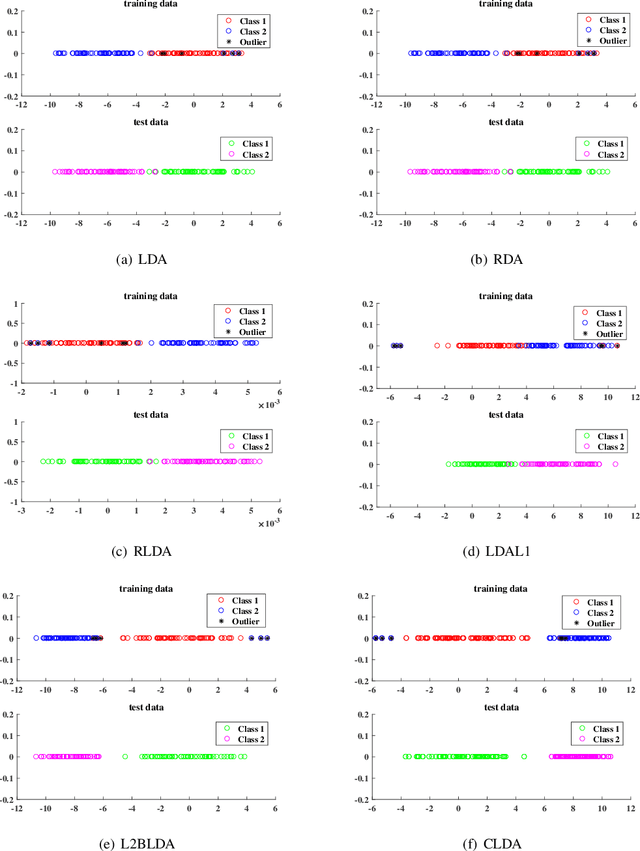
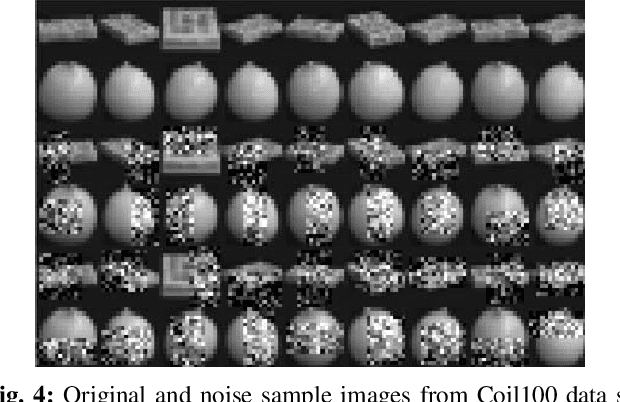
Classical linear discriminant analysis (LDA) is based on squared Frobenious norm and hence is sensitive to outliers and noise. To improve the robustness of LDA, in this paper, we introduce capped l_{2,1}-norm of a matrix, which employs non-squared l_2-norm and "capped" operation, and further propose a novel capped l_{2,1}-norm linear discriminant analysis, called CLDA. Due to the use of capped l_{2,1}-norm, CLDA can effectively remove extreme outliers and suppress the effect of noise data. In fact, CLDA can be also viewed as a weighted LDA. CLDA is solved through a series of generalized eigenvalue problems with theoretical convergency. The experimental results on an artificial data set, some UCI data sets and two image data sets demonstrate the effectiveness of CLDA.