 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-loop POMDP Simplification and Safe Skipping of Replanning with Formal Performance Guarantees
Apr 01, 2026Partially Observable Markov Decision Processes (POMDPs) provide a principled mathematical framework for decision-making under uncertainty. However, the exact solution to POMDPs is computationally intractable. In this paper, we address the computational intractability by introducing a novel framework for adaptive open-loop simplification with formal performance guarantees. Our method adaptively interleaves open-loop and closed-loop planning via a topology-based belief tree, enabling a significant reduction in planning complexity. The key contribution lies in the derivation of efficiently computable bounds which provide formal guarantees and can be used to ensure that our simplification can identify the immediate optimal action of the original POMDP problem. Our framework therefore provides computationally tractable performance guarantees for macro-actions within POMDPs. Furthermore, we propose a novel framework for safely skipping replanning during execution, supported by theoretical guarantees on multi-step open-loop action sequences. To the best of our knowledge, this framework is the first to address skipping replanning with formal performance guarantees. Practical online solvers for our proposed simplification are developed, including a sampling-based solver and an anytime solver. Empirical results demonstrate substantial computational speedups while maintaining provable performance guarantees, advancing the tractability and efficiency of POMDP planning.
Keyframe-Based Feed-Forward Visual Odometry
Jan 22, 2026The emergence of visual foundation models has revolutionized visual odometry~(VO) and SLAM, enabling pose estimation and dense reconstruction within a single feed-forward network. However, unlike traditional pipelines that leverage keyframe methods to enhance efficiency and accuracy, current foundation model based methods, such as VGGT-Long, typically process raw image sequences indiscriminately. This leads to computational redundancy and degraded performance caused by low inter-frame parallax, which provides limited contextual stereo information. Integrating traditional geometric heuristics into these methods is non-trivial, as their performance depends on high-dimensional latent representations rather than explicit geometric metrics. To bridge this gap, we propose a novel keyframe-based feed-forward VO. Instead of relying on hand-crafted rules, our approach employs reinforcement learning to derive an adaptive keyframe policy in a data-driven manner, aligning selection with the intrinsic characteristics of the underlying foundation model. We train our agent on TartanAir dataset and conduct extensive evaluations across several real-world datasets. Experimental results demonstrate that the proposed method achieves consistent and substantial improvements over state-of-the-art feed-forward VO methods.
Simplified POMDP Planning with an Alternative Observation Space and Formal Performance Guarantees
Oct 10, 2024



Online planning under uncertainty in partially observable domains is an essential capability in robotics and AI. The partially observable Markov decision process (POMDP) is a mathematically principled framework for addressing decision-making problems in this challenging setting. However, finding an optimal solution for POMDPs is computationally expensive and is feasible only for small problems. In this work, we contribute a novel method to simplify POMDPs by switching to an alternative, more compact, observation space and simplified model to speedup planning with formal performance guarantees. We introduce the notion of belief tree topology, which encodes the levels and branches in the tree that use the original and alternative observation space and models. Each belief tree topology comes with its own policy space and planning performance. Our key contribution is to derive bounds between the optimal Q-function of the original POMDP and the simplified tree defined by a given topology with a corresponding simplified policy space. These bounds are then used as an adaptation mechanism between different tree topologies until the optimal action of the original POMDP can be determined. Further, we consider a specific instantiation of our framework, where the alternative observation space and model correspond to a setting where the state is fully observable. We evaluate our approach in simulation, considering exact and approximate POMDP solvers and demonstrating a significant speedup while preserving solution quality. We believe this work opens new exciting avenues for online POMDP planning with formal performance guarantees.
A Dataset for Evaluating Multi-spectral Motion Estimation Methods
Jul 01, 2020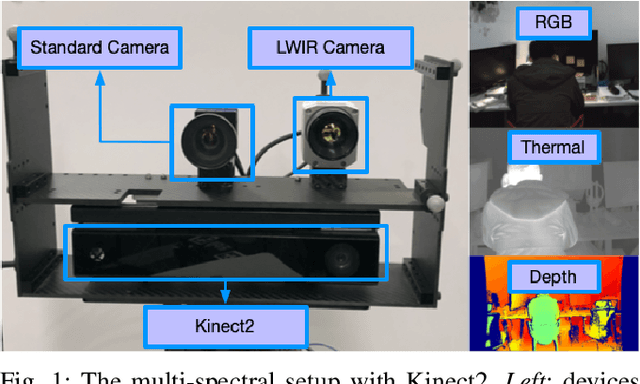
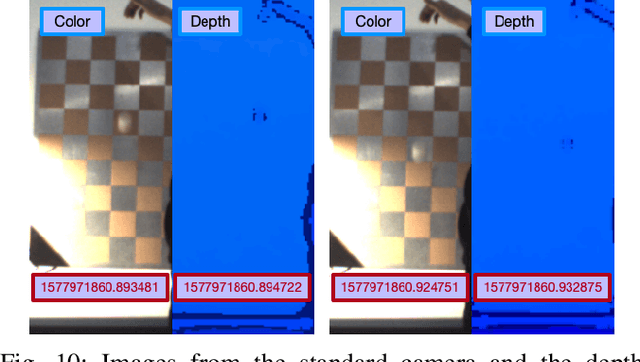
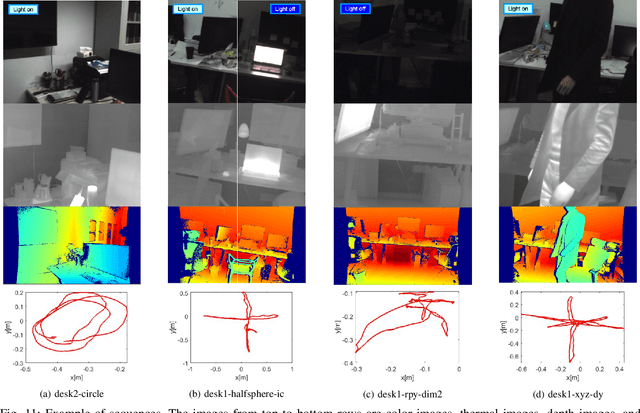
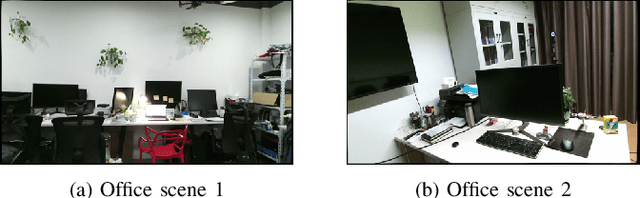
Visible images have been widely used for indoor motion estimation. Thermal images, in contrast, are more challenging to be used in motion estimation since they typically have lower resolution, less texture, and more noise. In this paper, a novel dataset for evaluating the performance of multi-spectral motion estimation systems is presented. The dataset includes both multi-spectral and dense depth images with accurate ground-truth camera poses provided by a motion capture system. All the sequences are recorded from a handheld multi-spectral device, which consists of a standard visible-light camera, a long-wave infrared camera, and a depth camera. The multi-spectral images, including both color and thermal images in full sensor resolution (640 $\times$ 480), are obtained from the hardware-synchronized standard and long-wave infrared camera at 32Hz. The depth images are captured by a Microsoft Kinect2 and can have benefits for learning cross-modalities stereo matching. In addition to the sequences with bright illumination, the dataset also contains scenes with dim or varying illumination. The full dataset, including both raw data and calibration data with detailed specifications of data format, is publicly available.