 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodiedRAG: Dynamic 3D Scene Graph Retrieval for Efficient and Scalable Robot Task Planning
Oct 31, 2024



Recent advances in Large Language Models (LLMs) have helped facilitate exciting progress for robotic planning in real, open-world environments. 3D scene graphs (3DSGs) offer a promising environment representation for grounding such LLM-based planners as they are compact and semantically rich. However, as the robot's environment scales (e.g., number of entities tracked) and the complexity of scene graph information increases (e.g., maintaining more attributes), providing the 3DSG as-is to an LLM-based planner quickly becomes infeasible due to input token count limits and attentional biases present in LLMs. Inspired by the successes of Retrieval-Augmented Generation (RAG) methods that retrieve query-relevant document chunks for LLM question and answering, we adapt the paradigm for our embodied domain. Specifically, we propose a 3D scene subgraph retrieval framework, called EmbodiedRAG, that we augment an LLM-based planner with for executing natural language robotic tasks. Notably, our retrieved subgraphs adapt to changes in the environment as well as changes in task-relevancy as the robot executes its plan. We demonstrate EmbodiedRAG's ability to significantly reduce input token counts (by an order of magnitude) and planning time (up to 70% reduction in average time per planning step) while improving success rates on AI2Thor simulated household tasks with a single-arm, mobile manipulator. Additionally, we implement EmbodiedRAG on a quadruped with a manipulator to highlight the performance benefits for robot deployment at the edge in real environments.
ConceptAgent: LLM-Driven Precondition Grounding and Tree Search for Robust Task Planning and Execution
Oct 08, 2024



Robotic planning and execution in open-world environments is a complex problem due to the vast state spaces and high variability of task embodiment. Recent advances in perception algorithms, combined with Large Language Models (LLMs) for planning, offer promising solutions to these challenges, as the common sense reasoning capabilities of LLMs provide a strong heuristic for efficiently searching the action space. However, prior work fails to address the possibility of hallucinations from LLMs, which results in failures to execute the planned actions largely due to logical fallacies at high- or low-levels. To contend with automation failure due to such hallucinations, we introduce ConceptAgent, a natural language-driven robotic platform designed for task execution in unstructured environments. With a focus on scalability and reliability of LLM-based planning in complex state and action spaces, we present innovations designed to limit these shortcomings, including 1) Predicate Grounding to prevent and recover from infeasible actions, and 2) an embodied version of LLM-guided Monte Carlo Tree Search with self reflection. In simulation experiments, ConceptAgent achieved a 19% task completion rate across three room layouts and 30 easy level embodied tasks outperforming other state-of-the-art LLM-driven reasoning baselines that scored 10.26% and 8.11% on the same benchmark. Additionally, ablation studies on moderate to hard embodied tasks revealed a 20% increase in task completion from the baseline agent to the fully enhanced ConceptAgent, highlighting the individual and combined contributions of Predicate Grounding and LLM-guided Tree Search to enable more robust automation in complex state and action spaces.
An Evaluation of Large Pre-Trained Models for Gesture Recognition using Synthetic Videos
Oct 03, 2024In this work, we explore the possibility of using synthetically generated data for video-based gesture recognition with large pre-trained models. We consider whether these models have sufficiently robust and expressive representation spaces to enable "training-free" classification. Specifically, we utilize various state-of-the-art video encoders to extract features for use in k-nearest neighbors classification, where the training data points are derived from synthetic videos only. We compare these results with another training-free approach -- zero-shot classification using text descriptions of each gesture. In our experiments with the RoCoG-v2 dataset, we find that using synthetic training videos yields significantly lower classification accuracy on real test videos compared to using a relatively small number of real training videos. We also observe that video backbones that were fine-tuned on classification tasks serve as superior feature extractors, and that the choice of fine-tuning data has a substantial impact on k-nearest neighbors performance. Lastly, we find that zero-shot text-based classification performs poorly on the gesture recognition task, as gestures are not easily described through natural language.
* Synthetic Data for Artificial Intelligence and Machine Learning: Tools, Techniques, and Applications II (SPIE Defense + Commercial Sensing, 2024)
Unsupervised Video Domain Adaptation with Masked Pre-Training and Collaborative Self-Training
Dec 06, 2023



In this work, we tackle the problem of unsupervised domain adaptation (UDA) for video action recognition. Our approach, which we call UNITE, uses an image teacher model to adapt a video student model to the target domain. UNITE first employs self-supervised pre-training to promote discriminative feature learning on target domain videos using a teacher-guided masked distillation objective. We then perform self-training on masked target data, using the video student model and image teacher model together to generate improved pseudolabels for unlabeled target videos. Our self-training process successfully leverages the strengths of both models to achieve strong transfer performance across domains. We evaluate our approach on multiple video domain adaptation benchmarks and observe significant improvements upon previously reported results.
ConceptGraphs: Open-Vocabulary 3D Scene Graphs for Perception and Planning
Sep 28, 2023



For robots to perform a wide variety of tasks, they require a 3D representation of the world that is semantically rich, yet compact and efficient for task-driven perception and planning. Recent approaches have attempted to leverage features from large vision-language models to encode semantics in 3D representations. However, these approaches tend to produce maps with per-point feature vectors, which do not scale well in larger environments, nor do they contain semantic spatial relationships between entities in the environment, which are useful for downstream planning. In this work, we propose ConceptGraphs, an open-vocabulary graph-structured representation for 3D scenes. ConceptGraphs is built by leveraging 2D foundation models and fusing their output to 3D by multi-view association. The resulting representations generalize to novel semantic classes, without the need to collect large 3D datasets or finetune models. We demonstrate the utility of this representation through a number of downstream planning tasks that are specified through abstract (language) prompts and require complex reasoning over spatial and semantic concepts. (Project page: https://concept-graphs.github.io/ Explainer video: https://youtu.be/mRhNkQwRYnc )
Latent Properties of Lifelong Learning Systems
Jul 28, 2022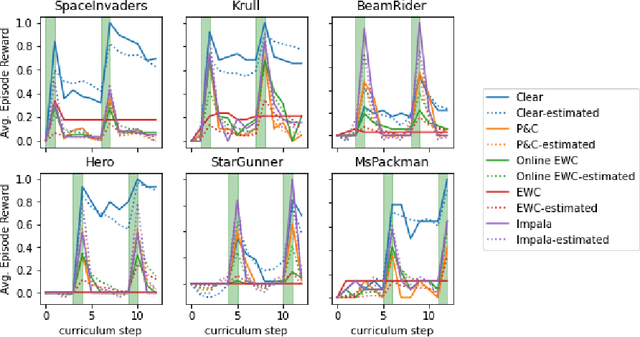
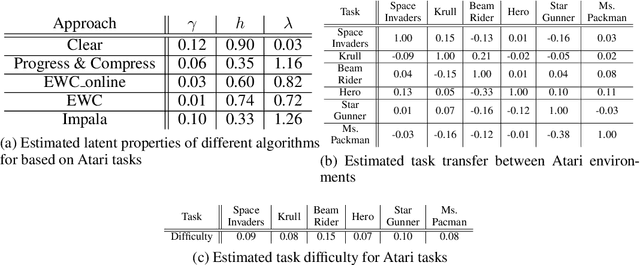
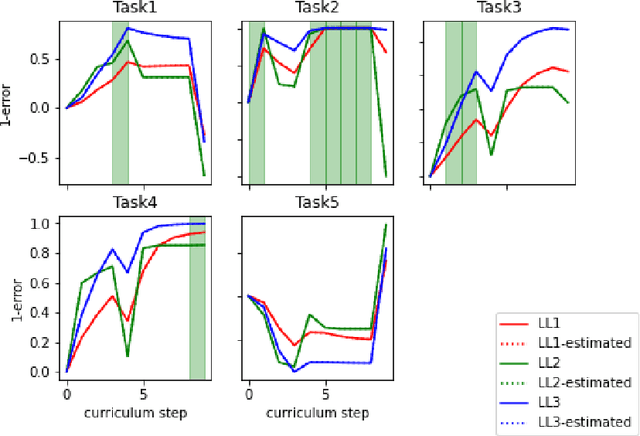
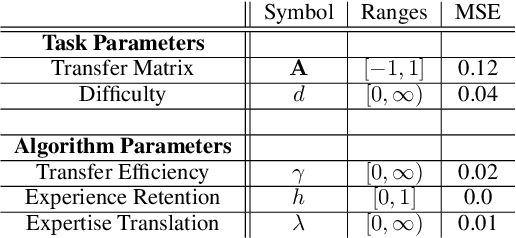
Creating artificial intelligence (AI) systems capable of demonstrating lifelong learning is a fundamental challenge, and many approaches and metrics have been proposed to analyze algorithmic properties. However, for existing lifelong learning metrics, algorithmic contributions are confounded by task and scenario structure. To mitigate this issue, we introduce an algorithm-agnostic explainable surrogate-modeling approach to estimate latent properties of lifelong learning algorithms. We validate the approach for estimating these properties via experiments on synthetic data. To validate the structure of the surrogate model, we analyze real performance data from a collection of popular lifelong learning approaches and baselines adapted for lifelong classification and lifelong reinforcement learning.