 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuadratic Objective Perturbation: Curvature-Based Differential Privacy
May 07, 2026Objective perturbation is a standard mechanism in differentially private empirical risk minimization. In particular, Linear Objective Perturbation (LOP) enforces privacy by adding a random linear term, while strong convexity and stability are ensured by an additional deterministic quadratic term. However, this approach requires the strong assumption of bounded gradients of the loss function, which excludes many modern machine learning models. In this work, we introduce Quadratic Objective Perturbation (QOP), which perturbs the objective with a random quadratic form. This perturbation induces strong convexity and enforces stability of the problem through curvature, thereby enabling privacy and allowing sensitivity to be controlled through spectral properties of the perturbation rather than assumptions on the gradients. As a result, we obtain $(\varepsilon, δ)$-differential privacy under weaker assumptions, in the interpolation regime. Furthermore, we extend the analysis to account for approximate solutions, showing that privacy guarantees are preserved under inexact solves. Additionally, we derive utility guarantees in terms of empirical excess risk, and provide a theoretical and numerical comparison to LOP, highlighting the advantages of curvature-based perturbations. Finally, we discuss algorithmic aspects and show that the resulting problems can be solved efficiently using modern splitting schemes.
Efficient Techniques for Data Reconstruction, with Finite-Width Recovery Guarantees
May 07, 2026Data reconstruction attacks on trained neural networks aim to recover the data on which the network has been trained and pose a significant threat to privacy, especially if the training dataset contains sensitive information. Here, we propose a unified optimization formulation of the data reconstruction problem based on initial and trained parameter values, incorporating state-of-the-art proposals. We show that in the random feature model, this formulation provably leads to training data reconstruction with high probability, provided the network width is sufficiently large; this unprecedented finite-width result uses PAC-style bounds. Furthermore, when the data lies in a low-dimensional subspace, we show that the network width requirement for successful reconstruction can be relaxed, with bounds depending on the subspace dimension rather than the ambient dimension. For general neural network models and unknown data orientations, we propose an efficient reconstruction algorithm that approximates the low-dimensional data subspace through the change in the first-layer weights during training and uses only the last-layer weights for reconstruction, thus reducing the search space dimension and the required network width for high-quality reconstructions. Our numerical experiments on synthetic datasets and CIFAR-10 confirm that our subspace-aware reconstruction approach outperforms standard full-space techniques.
A Parameter-Free First-Order Algorithm for Non-Convex Optimization with $\tilde{\mkern1mu O}(ε^{-5/3})$ Global Rate
May 04, 2026We introduce PF-AGD, the first parameter-free, deterministic, accelerated first-order method to achieve $O(ε^{-5/3}\log(1/ε))$ oracle complexity bound when minimizing sufficiently smooth, non-convex functions; this is the best-known bound for first-order methods on smooth non-convex objectives. Unlike existing methods possessing this rate that require a priori knowledge of smoothness constants, we use an adaptive backtracking scheme and a gradient-based restart mechanism to estimate local curvature. This yields a practical algorithm that matches best-known theoretical rates. Empirically, PF-AGD outperforms the practical variant of AGD-Until-Guilty (Carmon et al., 2017), as well as other parameter-free variants, and is a viable alternative to nonlinear conjugate gradient methods.
SoS1: O1 and R1-Like Reasoning LLMs are Sum-of-Square Solvers
Feb 27, 2025



Large Language Models (LLMs) have achieved human-level proficiency across diverse tasks, but their ability to perform rigorous mathematical problem solving remains an open challenge. In this work, we investigate a fundamental yet computationally intractable problem: determining whether a given multivariate polynomial is nonnegative. This problem, closely related to Hilbert's Seventeenth Problem, plays a crucial role in global polynomial optimization and has applications in various fields. First, we introduce SoS-1K, a meticulously curated dataset of approximately 1,000 polynomials, along with expert-designed reasoning instructions based on five progressively challenging criteria. Evaluating multiple state-of-the-art LLMs, we find that without structured guidance, all models perform only slightly above the random guess baseline 50%. However, high-quality reasoning instructions significantly improve accuracy, boosting performance up to 81%. Furthermore, our 7B model, SoS-7B, fine-tuned on SoS-1K for just 4 hours, outperforms the 671B DeepSeek-V3 and GPT-4o-mini in accuracy while only requiring 1.8% and 5% of the computation time needed for letters, respectively. Our findings highlight the potential of LLMs to push the boundaries of mathematical reasoning and tackle NP-hard problems.
Random Subspace Cubic-Regularization Methods, with Applications to Low-Rank Functions
Jan 16, 2025



We propose and analyze random subspace variants of the second-order Adaptive Regularization using Cubics (ARC) algorithm. These methods iteratively restrict the search space to some random subspace of the parameters, constructing and minimizing a local model only within this subspace. Thus, our variants only require access to (small-dimensional) projections of first- and second-order problem derivatives and calculate a reduced step inexpensively. Under suitable assumptions, the ensuing methods maintain the optimal first-order, and second-order, global rates of convergence of (full-dimensional) cubic regularization, while showing improved scalability both theoretically and numerically, particularly when applied to low-rank functions. When applied to the latter, our adaptive variant naturally adapts the subspace size to the true rank of the function, without knowing it a priori.
Dimensionality Reduction Techniques for Global Bayesian Optimisation
Dec 12, 2024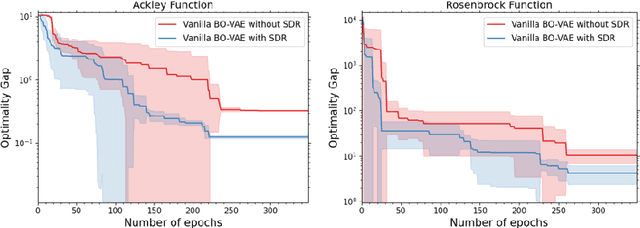
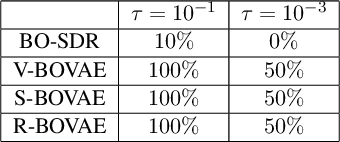
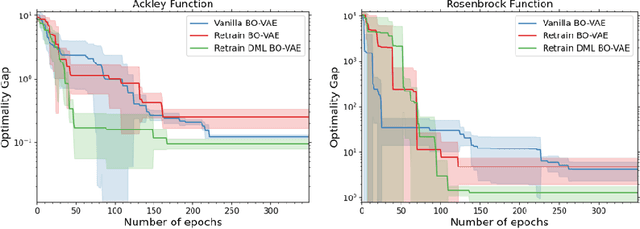
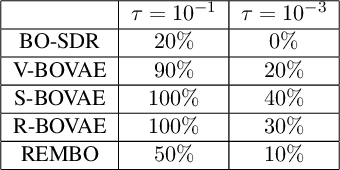
Bayesian Optimisation (BO) is a state-of-the-art global optimisation technique for black-box problems where derivative information is unavailable, and sample efficiency is crucial. However, improving the general scalability of BO has proved challenging. Here, we explore Latent Space Bayesian Optimisation (LSBO), that applies dimensionality reduction to perform BO in a reduced-dimensional subspace. While early LSBO methods used (linear) random projections (Wang et al., 2013), we employ Variational Autoencoders (VAEs) to manage more complex data structures and general DR tasks. Building on Grosnit et. al. (2021), we analyse the VAE-based LSBO framework, focusing on VAE retraining and deep metric loss. We suggest a few key corrections in their implementation, originally designed for tasks such as molecule generation, and reformulate the algorithm for broader optimisation purposes. Our numerical results show that structured latent manifolds improve BO performance. Additionally, we examine the use of the Mat\'{e}rn-$\frac{5}{2}$ kernel for Gaussian Processes in this LSBO context. We also integrate Sequential Domain Reduction (SDR), a standard global optimization efficiency strategy, into BO. SDR is included in a GPU-based environment using \textit{BoTorch}, both in the original and VAE-generated latent spaces, marking the first application of SDR within LSBO.
Registration of algebraic varieties using Riemannian optimization
Jan 16, 2024We consider the point cloud registration problem, the task of finding a transformation between two point clouds that represent the same object but are expressed in different coordinate systems. Our approach is not based on a point-to-point correspondence, matching every point in the source point cloud to a point in the target point cloud. Instead, we assume and leverage a low-dimensional nonlinear geometric structure of the data. Firstly, we approximate each point cloud by an algebraic variety (a set defined by finitely many polynomial equations). This is done by solving an optimization problem on the Grassmann manifold, using a connection between algebraic varieties and polynomial bases. Secondly, we solve an optimization problem on the orthogonal group to find the transformation (rotation $+$ translation) which makes the two algebraic varieties overlap. We use second-order Riemannian optimization methods for the solution of both steps. Numerical experiments on real and synthetic data are provided, with encouraging results. Our approach is particularly useful when the two point clouds describe different parts of an objects (which may not even be overlapping), on the condition that the surface of the object may be well approximated by a set of polynomial equations. The first procedure -- the approximation -- is of independent interest, as it can be used for denoising data that belongs to an algebraic variety. We provide statistical guarantees for the estimation error of the denoising using Stein's unbiased estimator.
A Randomised Subspace Gauss-Newton Method for Nonlinear Least-Squares
Nov 10, 2022


We propose a Randomised Subspace Gauss-Newton (R-SGN) algorithm for solving nonlinear least-squares optimization problems, that uses a sketched Jacobian of the residual in the variable domain and solves a reduced linear least-squares on each iteration. A sublinear global rate of convergence result is presented for a trust-region variant of R-SGN, with high probability, which matches deterministic counterpart results in the order of the accuracy tolerance. Promising preliminary numerical results are presented for R-SGN on logistic regression and on nonlinear regression problems from the CUTEst collection.
* This work first appears in Thirty-seventh International Conference on Machine Learning, 2020, in Workshop on Beyond First Order Methods in ML Systems. https://sites.google.com/view/optml-icml2020/accepted-papers?authuser=0. arXiv admin note: text overlap with arXiv:2206.03371
Nonlinear matrix recovery using optimization on the Grassmann manifold
Sep 13, 2021



We investigate the problem of recovering a partially observed high-rank matrix whose columns obey a nonlinear structure such as a union of subspaces, an algebraic variety or grouped in clusters. The recovery problem is formulated as the rank minimization of a nonlinear feature map applied to the original matrix, which is then further approximated by a constrained non-convex optimization problem involving the Grassmann manifold. We propose two sets of algorithms, one arising from Riemannian optimization and the other as an alternating minimization scheme, both of which include first- and second-order variants. Both sets of algorithms have theoretical guarantees. In particular, for the alternating minimization, we establish global convergence and worst-case complexity bounds. Additionally, using the Kurdyka-Lojasiewicz property, we show that the alternating minimization converges to a unique limit point. We provide extensive numerical results for the recovery of union of subspaces and clustering under entry sampling and dense Gaussian sampling. Our methods are competitive with existing approaches and, in particular, high accuracy is achieved in the recovery using Riemannian second-order methods.
Global optimization using random embeddings
Jul 26, 2021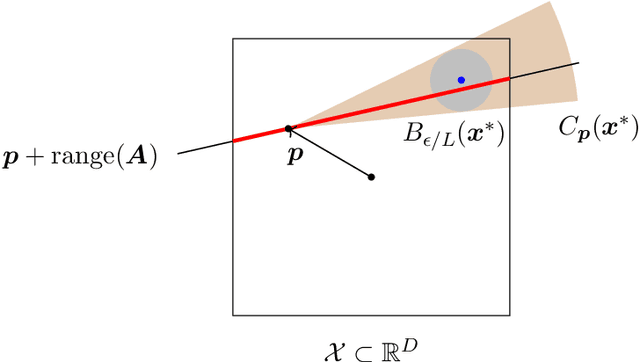
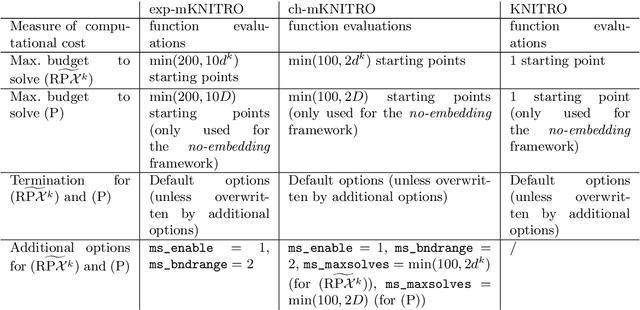
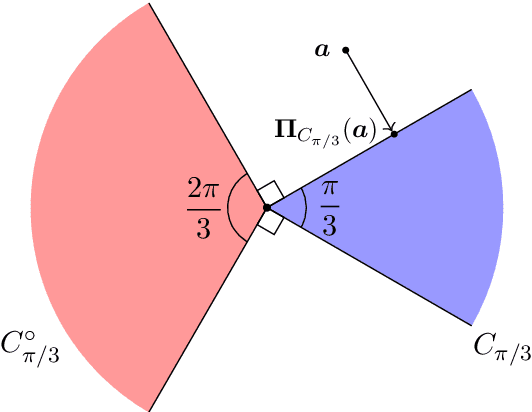

We propose a random-subspace algorithmic framework for global optimization of Lipschitz-continuous objectives, and analyse its convergence using novel tools from conic integral geometry. X-REGO randomly projects, in a sequential or simultaneous manner, the high-dimensional original problem into low-dimensional subproblems that can then be solved with any global, or even local, optimization solver. We estimate the probability that the randomly-embedded subproblem shares (approximately) the same global optimum as the original problem. This success probability is then used to show convergence of X-REGO to an approximate global solution of the original problem, under weak assumptions on the problem (having a strictly feasible global solution) and on the solver (guaranteed to find an approximate global solution of the reduced problem with sufficiently high probability). In the particular case of unconstrained objectives with low effective dimension, that only vary over a low-dimensional subspace, we propose an X-REGO variant that explores random subspaces of increasing dimension until finding the effective dimension of the problem, leading to X-REGO globally converging after a finite number of embeddings, proportional to the effective dimension. We show numerically that this variant efficiently finds both the effective dimension and an approximate global minimizer of the original problem.