 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI Native Games: A Survey and Roadmap
Jul 01, 2026Generative AI now enables games to produce dialogue, quests, characters, images, and worlds at runtime. Yet generation alone does not make a game AI-native, nor does it guarantee playability. This paper defines AI-native games by whether runtime generative AI is constitutive of the core loop: if the AI component were removed or trivially replaced, the central form of play would collapse or become fundamentally different. This counterfactual criterion separates AI-native games from AI-augmented games, boundary artifacts, chatbots, tavern-style role-play, procedural content generation, and AI-assisted production. Using this definition, we screen candidate artifacts and analyze 53 publicly available AI-native games and prototypes. We introduce a dual-axis G/N taxonomy: the G-axis captures player-facing game type, while the N-axis captures the dominant AI mechanic that makes generative AI indispensable to play. The corpus is concentrated around language-forward designs, especially narrative adventure, epistemic interaction, and generative narrative, while categories such as semantic adjudication, multi-agent simulation, generative construction, and relationship/companion play remain less represented. We argue that the central design problem is organizing semantic openness into stable gameplay. AI-native design depends on mechanical invariants: goals, rules, state, feedback, pacing, and player agency that make open-ended AI outputs interpretable and consequential. We conclude with a roadmap for controllable generation, AI-as-mechanic design, multimodal and multi-agent systems, inference economics, evaluation, safety, and regulation.
High Dimensional Procedural Content Generation
Feb 21, 2026Procedural content generation (PCG) has made substantial progress in shaping static 2D/3D geometry, while most methods treat gameplay mechanics as auxiliary and optimize only over space. We argue that this limits controllability and expressivity, and formally introduce High-Dimensional PCG (HDPCG): a framework that elevates non-geometric gameplay dimensions to first-class coordinates of a joint state space. We instantiate HDPCG along two concrete directions. Direction-Space augments geometry with a discrete layer dimension and validates reachability in 4D (x,y,z,l), enabling unified treatment of 2.5D/3.5D mechanics such as gravity inversion and parallel-world switching. Direction-Time augments geometry with temporal dynamics via time-expanded graphs, capturing action semantics and conflict rules. For each direction, we present three general, practicable algorithms with a shared pipeline of abstract skeleton generation, controlled grounding, high-dimensional validation, and multi-metric evaluation. Large-scale experiments across diverse settings validate the integrity of our problem formulation and the effectiveness of our methods on playability, structure, style, robustness, and efficiency. Beyond quantitative results, Unity-based case studies recreate playable scenarios that accord with our metrics. We hope HDPCG encourages a shift in PCG toward general representations and the generation of gameplay-relevant dimensions beyond geometry, paving the way for controllable, verifiable, and extensible level generation.
How Far Can We Go with Pixels Alone? A Pilot Study on Screen-Only Navigation in Commercial 3D ARPGs
Feb 21, 2026Modern 3D game levels rely heavily on visual guidance, yet the navigability of level layouts remains difficult to quantify. Prior work either simulates play in simplified environments or analyzes static screenshots for visual affordances, but neither setting faithfully captures how players explore complex, real-world game levels. In this paper, we build on an existing open-source visual affordance detector and instantiate a screen-only exploration and navigation agent that operates purely from visual affordances. Our agent consumes live game frames, identifies salient interest points, and drives a simple finite-state controller over a minimal action space to explore Dark Souls-style linear levels and attempt to reach expected goal regions. Pilot experiments show that the agent can traverse most required segments and exhibits meaningful visual navigation behavior, but also highlight that limitations of the underlying visual model prevent truly comprehensive and reliable auto-navigation. We argue that this system provides a concrete, shared baseline and evaluation protocol for visual navigation in complex games, and we call for more attention to this necessary task. Our results suggest that purely vision-based sense-making models, with discrete single-modality inputs and without explicit reasoning, can effectively support navigation and environment understanding in idealized settings, but are unlikely to be a general solution on their own.
(Perlin) Noise as AI coordinator
Feb 21, 2026Large scale control of nonplayer agents is central to modern games, while production systems still struggle to balance several competing goals: locally smooth, natural behavior, and globally coordinated variety across space and time. Prior approaches rely on handcrafted rules or purely stochastic triggers, which either converge to mechanical synchrony or devolve into uncorrelated noise that is hard to tune. Continuous noise signals such as Perlin noise are well suited to this gap because they provide spatially and temporally coherent randomness, and they are already widely used for terrain, biomes, and other procedural assets. We adapt these signals for the first time to large scale AI control and present a general framework that treats continuous noise fields as an AI coordinator. The framework combines three layers of control: behavior parameterization for movement at the agent level, action time scheduling for when behaviors start and stop, and spawn or event type and feature generation for what appears and where. We instantiate the framework reproducibly and evaluate Perlin noise as a representative coordinator across multiple maps, scales, and seeds against random, filtered, deterministic, neighborhood constrained, and physics inspired baselines. Experiments show that coordinated noise fields provide stable activation statistics without lockstep, strong spatial coverage and regional balance, better diversity with controllable polarization, and competitive runtime. We hope this work motivates a broader exploration of coordinated noise in game AI as a practical path to combine efficiency, controllability, and quality.
CSP4SDG: Constraint and Information-Theory Based Role Identification in Social Deduction Games with LLM-Enhanced Inference
Nov 09, 2025In Social Deduction Games (SDGs) such as Avalon, Mafia, and Werewolf, players conceal their identities and deliberately mislead others, making hidden-role inference a central and demanding task. Accurate role identification, which forms the basis of an agent's belief state, is therefore the keystone for both human and AI performance. We introduce CSP4SDG, a probabilistic, constraint-satisfaction framework that analyses gameplay objectively. Game events and dialogue are mapped to four linguistically-agnostic constraint classes-evidence, phenomena, assertions, and hypotheses. Hard constraints prune impossible role assignments, while weighted soft constraints score the remainder; information-gain weighting links each hypothesis to its expected value under entropy reduction, and a simple closed-form scoring rule guarantees that truthful assertions converge to classical hard logic with minimum error. The resulting posterior over roles is fully interpretable and updates in real time. Experiments on three public datasets show that CSP4SDG (i) outperforms LLM-based baselines in every inference scenario, and (ii) boosts LLMs when supplied as an auxiliary "reasoning tool." Our study validates that principled probabilistic reasoning with information theory is a scalable alternative-or complement-to heavy-weight neural models for SDGs.
Tension Space Analysis for Emergent Narrative
Apr 22, 2020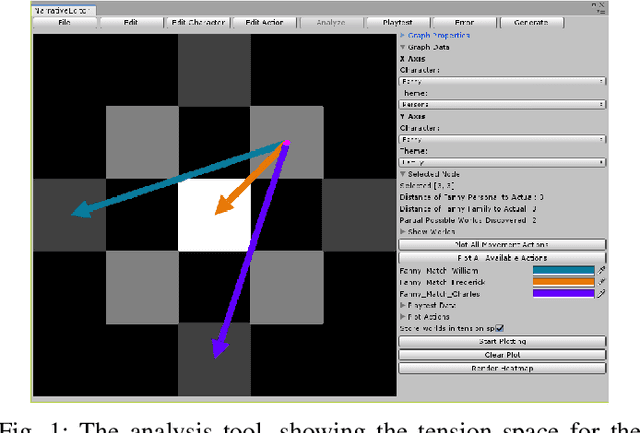
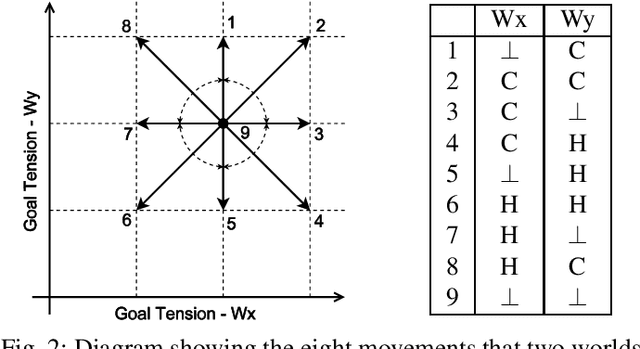
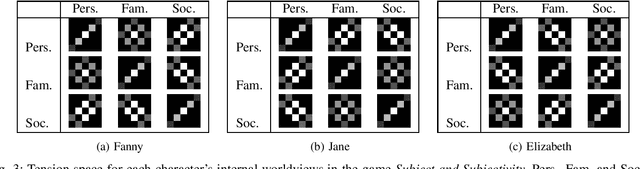
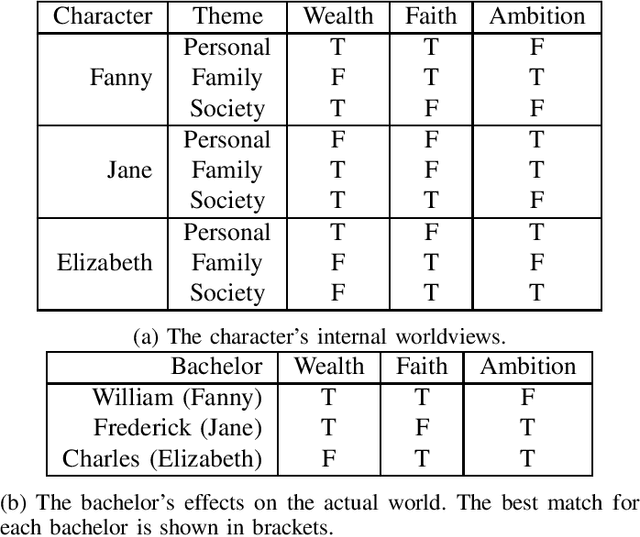
Emergent narratives provide a unique and compelling approach to interactive storytelling through simulation, and have applications in games, narrative generation, and virtual agents. However the inherent complexity of simulation makes understanding the expressive potential of emergent narratives difficult, particularly at the design phase of development. In this paper, we present a novel approach to emergent narrative using the narratological theory of possible worlds and demonstrate how the design of works in such a system can be understood through a formal means of analysis inspired by expressive range analysis. Lastly, we propose a novel way through which content may be authored for the emergent narrative system using a sketch-based interface.
Offline Grid-Based Coverage path planning for guards in games
Jan 15, 2020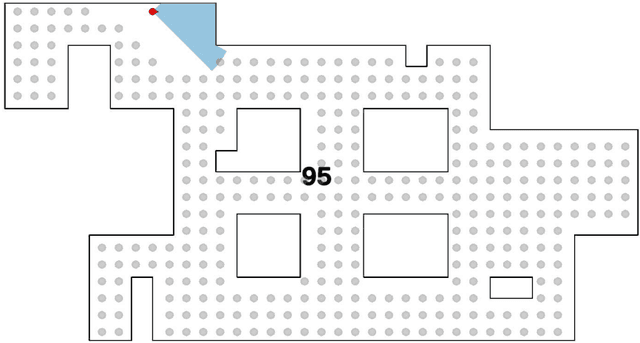
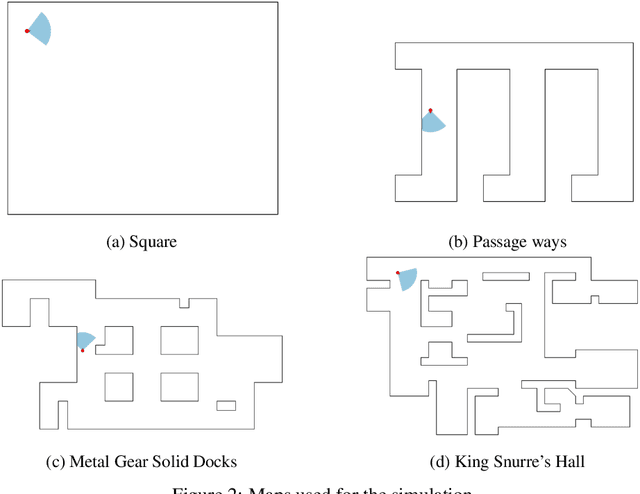
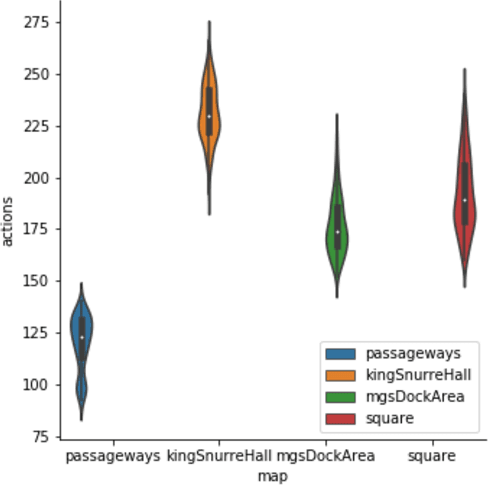
Algorithmic approaches to exhaustive coverage have application in video games, enabling automatic game level exploration. Current designs use simple heuristics that frequently result in poor performance or exhibit unnatural behaviour. In this paper, we introduce a novel algorithm for covering a 2D polygonal (with holes) area. We assume prior knowledge of the map layout and use a grid-based world representation. Experimental analysis over several scenarios ranging from simple layouts to more complex maps used in actual games show good performance. This work serves as an initial step towards building a more efficient coverage path planning algorithm for non-player characters.
Generating Paths with WFC
Aug 13, 2018


Motion plans are often randomly generated for minor game NPCs. Repetitive or regular movements, however, require non-trivial programming effort and/or integration with a pathing system. We here describe an example-based approach to path generation that requires little or no additional programming effort. Our work modifies the Wave Function Collapse (WFC) algorithm, adapting it to produce pathing plans similar to an input sketch. We show how simple sketch modifications control path characteristics, and demonstrate feasibility through a usable Unity implementation.
Exploration in NetHack With Secret Discovery
Aug 06, 2018



Roguelike games generally feature exploration problems as a critical, yet often repetitive element of gameplay. Automated approaches, however, face challenges in terms of optimality, as well as due to incomplete information, such as from the presence of secret doors. This paper presents an algorithmic approach to exploration of roguelike dungeon environments. Our design aims to minimize exploration time, balancing coverage and discovery of secret areas with resource cost. Our algorithm is based on the concept of occupancy maps popular in robotics, adapted to encourage efficient discovery of secret access points. Through extensive experimentation on NetHack maps we show that this technique is significantly more efficient than simpler greedy approaches and an existing automated player. We further investigate optimized parameterization for the algorithm through a comprehensive data analysis. These results point towards better automation for players as well as heuristics applicable to fully automated gameplay.