 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the necessity of adaptive regularisation:Optimal anytime online learning on $\boldsymbol{\ell_p}$-balls
Jun 24, 2025We study online convex optimization on $\ell_p$-balls in $\mathbb{R}^d$ for $p > 2$. While always sub-linear, the optimal regret exhibits a shift between the high-dimensional setting ($d > T$), when the dimension $d$ is greater than the time horizon $T$ and the low-dimensional setting ($d \leq T$). We show that Follow-the-Regularised-Leader (FTRL) with time-varying regularisation which is adaptive to the dimension regime is anytime optimal for all dimension regimes. Motivated by this, we ask whether it is possible to obtain anytime optimality of FTRL with fixed non-adaptive regularisation. Our main result establishes that for separable regularisers, adaptivity in the regulariser is necessary, and that any fixed regulariser will be sub-optimal in one of the two dimension regimes. Finally, we provide lower bounds which rule out sub-linear regret bounds for the linear bandit problem in sufficiently high-dimension for all $\ell_p$-balls with $p \geq 1$.
Learning Fair And Effective Points-Based Rewards Programs
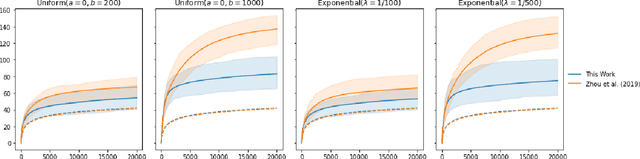
Jun 04, 2025Points-based rewards programs are a prevalent way to incentivize customer loyalty; in these programs, customers who make repeated purchases from a seller accumulate points, working toward eventual redemption of a free reward. These programs have recently come under scrutiny due to accusations of unfair practices in their implementation. Motivated by these concerns, we study the problem of fairly designing points-based rewards programs, with a focus on two obstacles that put fairness at odds with their effectiveness. First, due to customer heterogeneity, the seller should set different redemption thresholds for different customers to generate high revenue. Second, the relationship between customer behavior and the number of accumulated points is typically unknown; this requires experimentation which may unfairly devalue customers' previously earned points. We first show that an individually fair rewards program that uses the same redemption threshold for all customers suffers a loss in revenue of at most a factor of $1+\ln 2$, compared to the optimal personalized strategy that differentiates between customers. We then tackle the problem of designing temporally fair learning algorithms in the presence of demand uncertainty. Toward this goal, we design a learning algorithm that limits the risk of point devaluation due to experimentation by only changing the redemption threshold $O(\log T)$ times, over a horizon of length $T$. This algorithm achieves the optimal (up to polylogarithmic factors) $\widetilde{O}(\sqrt{T})$ regret in expectation. We then modify this algorithm to only ever decrease redemption thresholds, leading to improved fairness at a cost of only a constant factor in regret. Extensive numerical experiments show the limited value of personalization in average-case settings, in addition to demonstrating the strong practical performance of our proposed learning algorithms.
When and why randomised exploration works (in linear bandits)
Feb 13, 2025
We provide an approach for the analysis of randomised exploration algorithms like Thompson sampling that does not rely on forced optimism or posterior inflation. With this, we demonstrate that in the $d$-dimensional linear bandit setting, when the action space is smooth and strongly convex, randomised exploration algorithms enjoy an $n$-step regret bound of the order $O(d\sqrt{n} \log(n))$. Notably, this shows for the first time that there exist non-trivial linear bandit settings where Thompson sampling can achieve optimal dimension dependence in the regret.
QuACK: A Multipurpose Queuing Algorithm for Cooperative $k$-Armed Bandits
Oct 31, 2024



We study the cooperative stochastic $k$-armed bandit problem, where a network of $m$ agents collaborate to find the optimal action. In contrast to most prior work on this problem, which focuses on extending a specific algorithm to the multi-agent setting, we provide a black-box reduction that allows us to extend any single-agent bandit algorithm to the multi-agent setting. Under mild assumptions on the bandit environment, we prove that our reduction transfers the regret guarantees of the single-agent algorithm to the multi-agent setting. These guarantees are tight in subgaussian environments, in that using a near minimax optimal single-player algorithm is near minimax optimal in the multi-player setting up to an additive graph-dependent quantity. Our reduction and theoretical results are also general, and apply to many different bandit settings. By plugging in appropriate single-player algorithms, we can easily develop provably efficient algorithms for many multi-player settings such as heavy-tailed bandits, duelling bandits and bandits with local differential privacy, among others. Experimentally, our approach is competitive with or outperforms specialised multi-agent algorithms.
Sample-Efficiency in Multi-Batch Reinforcement Learning: The Need for Dimension-Dependent Adaptivity
Oct 02, 2023We theoretically explore the relationship between sample-efficiency and adaptivity in reinforcement learning. An algorithm is sample-efficient if it uses a number of queries $n$ to the environment that is polynomial in the dimension $d$ of the problem. Adaptivity refers to the frequency at which queries are sent and feedback is processed to update the querying strategy. To investigate this interplay, we employ a learning framework that allows sending queries in $K$ batches, with feedback being processed and queries updated after each batch. This model encompasses the whole adaptivity spectrum, ranging from non-adaptive 'offline' ($K=1$) to fully adaptive ($K=n$) scenarios, and regimes in between. For the problems of policy evaluation and best-policy identification under $d$-dimensional linear function approximation, we establish $\Omega(\log \log d)$ lower bounds on the number of batches $K$ required for sample-efficient algorithms with $n = O(poly(d))$ queries. Our results show that just having adaptivity ($K>1$) does not necessarily guarantee sample-efficiency. Notably, the adaptivity-boundary for sample-efficiency is not between offline reinforcement learning ($K=1$), where sample-efficiency was known to not be possible, and adaptive settings. Instead, the boundary lies between different regimes of adaptivity and depends on the problem dimension.
Trading-Off Payments and Accuracy in Online Classification with Paid Stochastic Experts
Jul 03, 2023



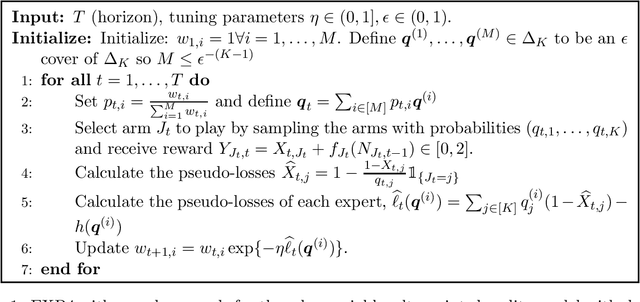
We investigate online classification with paid stochastic experts. Here, before making their prediction, each expert must be paid. The amount that we pay each expert directly influences the accuracy of their prediction through some unknown Lipschitz "productivity" function. In each round, the learner must decide how much to pay each expert and then make a prediction. They incur a cost equal to a weighted sum of the prediction error and upfront payments for all experts. We introduce an online learning algorithm whose total cost after $T$ rounds exceeds that of a predictor which knows the productivity of all experts in advance by at most $\mathcal{O}(K^2(\log T)\sqrt{T})$ where $K$ is the number of experts. In order to achieve this result, we combine Lipschitz bandits and online classification with surrogate losses. These tools allow us to improve upon the bound of order $T^{2/3}$ one would obtain in the standard Lipschitz bandit setting. Our algorithm is empirically evaluated on synthetic data
Optimal Convergence Rate for Exact Policy Mirror Descent in Discounted Markov Decision Processes
Feb 22, 2023

The classical algorithms used in tabular reinforcement learning (Value Iteration and Policy Iteration) have been shown to converge linearly with a rate given by the discount factor $\gamma$ of a discounted Markov Decision Process. Recently, there has been an increased interest in the study of gradient based methods. In this work, we show that the dimension-free linear $\gamma$-rate of classical reinforcement learning algorithms can be achieved by a general family of unregularised Policy Mirror Descent (PMD) algorithms under an adaptive step-size. We also provide a matching worst-case lower-bound that demonstrates that the $\gamma$-rate is optimal for PMD methods. Our work offers a novel perspective on the convergence of PMD. We avoid the use of the performance difference lemma beyond establishing the monotonic improvement of the iterates, which leads to a simple analysis that may be of independent interest. We also extend our analysis to the inexact setting and establish the first dimension-free $\varepsilon$-optimal sample complexity for unregularised PMD under a generative model, improving upon the best-known result.
Delayed Feedback in Kernel Bandits
Feb 01, 2023



Black box optimisation of an unknown function from expensive and noisy evaluations is a ubiquitous problem in machine learning, academic research and industrial production. An abstraction of the problem can be formulated as a kernel based bandit problem (also known as Bayesian optimisation), where a learner aims at optimising a kernelized function through sequential noisy observations. The existing work predominantly assumes feedback is immediately available; an assumption which fails in many real world situations, including recommendation systems, clinical trials and hyperparameter tuning. We consider a kernel bandit problem under stochastically delayed feedback, and propose an algorithm with $\tilde{\mathcal{O}}(\sqrt{\Gamma_k(T)T}+\mathbb{E}[\tau])$ regret, where $T$ is the number of time steps, $\Gamma_k(T)$ is the maximum information gain of the kernel with $T$ observations, and $\tau$ is the delay random variable. This represents a significant improvement over the state of the art regret bound of $\tilde{\mathcal{O}}(\Gamma_k(T)\sqrt{T}+\mathbb{E}[\tau]\Gamma_k(T))$ reported in Verma et al. (2022). In particular, for very non-smooth kernels, the information gain grows almost linearly in time, trivializing the existing results. We also validate our theoretical results with simulations.
Delayed Feedback in Generalised Linear Bandits Revisited
Jul 25, 2022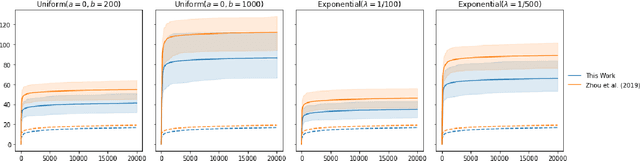
The stochastic generalised linear bandit is a well-understood model for sequential decision-making problems, with many algorithms achieving near-optimal regret guarantees under immediate feedback. However, in many real world settings, the requirement that the reward is observed immediately is not applicable. In this setting, standard algorithms are no longer theoretically understood. We study the phenomenon of delayed rewards in a theoretical manner by introducing a delay between selecting an action and receiving the reward. Subsequently, we show that an algorithm based on the optimistic principle improves on existing approaches for this setting by eliminating the need for prior knowledge of the delay distribution and relaxing assumptions on the decision set and the delays. This also leads to improving the regret guarantees from $ \widetilde O(\sqrt{dT}\sqrt{d + \mathbb{E}[\tau]})$ to $ \widetilde O(d\sqrt{T} + d^{3/2}\mathbb{E}[\tau])$, where $\mathbb{E}[\tau]$ denotes the expected delay, $d$ is the dimension and $T$ the time horizon and we have suppressed logarithmic terms. We verify our theoretical results through experiments on simulated data.
Bandit problems with fidelity rewards
Nov 25, 2021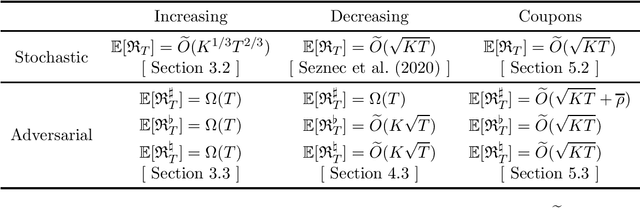
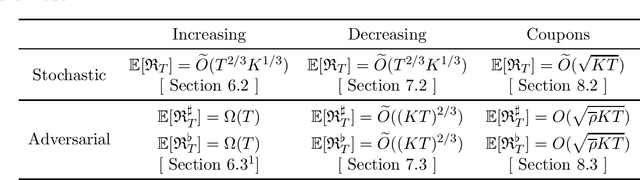
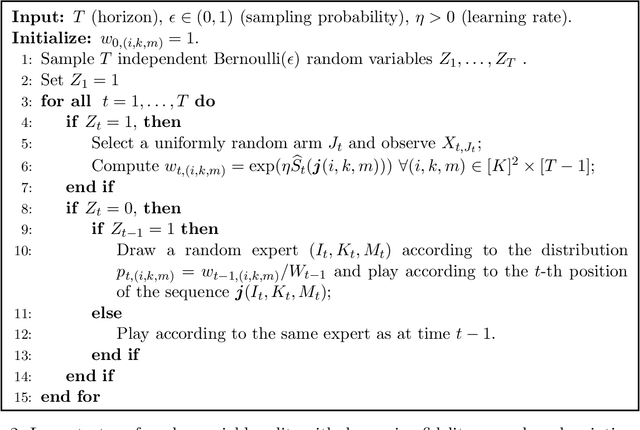
The fidelity bandits problem is a variant of the $K$-armed bandit problem in which the reward of each arm is augmented by a fidelity reward that provides the player with an additional payoff depending on how 'loyal' the player has been to that arm in the past. We propose two models for fidelity. In the loyalty-points model the amount of extra reward depends on the number of times the arm has previously been played. In the subscription model the additional reward depends on the current number of consecutive draws of the arm. We consider both stochastic and adversarial problems. Since single-arm strategies are not always optimal in stochastic problems, the notion of regret in the adversarial setting needs careful adjustment. We introduce three possible notions of regret and investigate which can be bounded sublinearly. We study in detail the special cases of increasing, decreasing and coupon (where the player gets an additional reward after every $m$ plays of an arm) fidelity rewards. For the models which do not necessarily enjoy sublinear regret, we provide a worst case lower bound. For those models which exhibit sublinear regret, we provide algorithms and bound their regret.