 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePose Estimation Based on 3D Models
Jun 20, 2015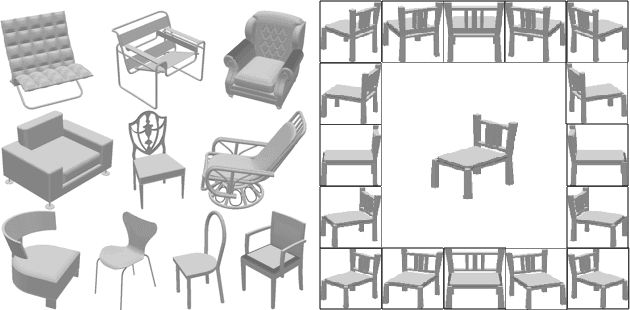
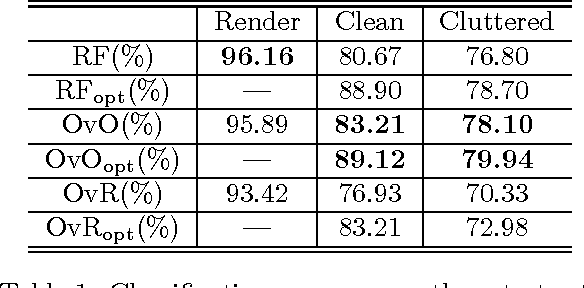

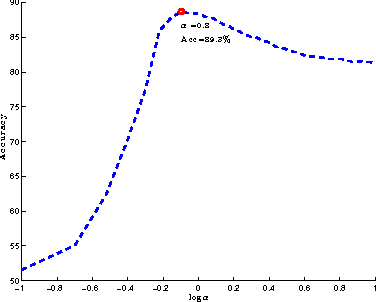
In this paper, we proposed a pose estimation system based on rendered image training set, which predicts the pose of objects in real image, with knowledge of object category and tight bounding box. We developed a patch-based multi-class classification algorithm, and an iterative approach to improve the accuracy. We achieved state-of-the-art performance on pose estimation task.
3D Reconstruction from Full-view Fisheye Camera
Jun 20, 2015
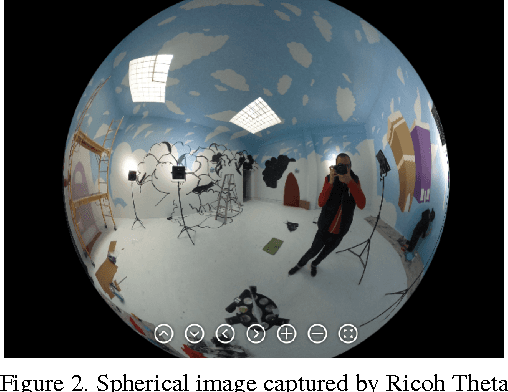
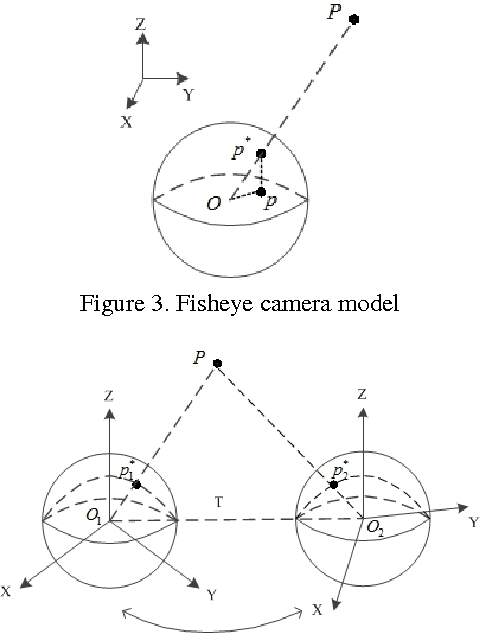
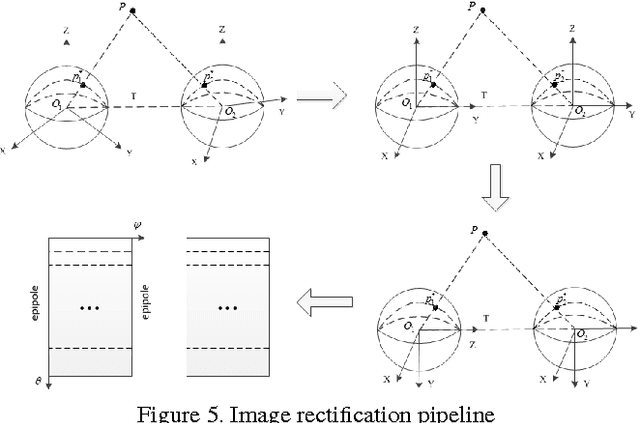
In this report, we proposed a 3D reconstruction method for the full-view fisheye camera. The camera we used is Ricoh Theta, which captures spherical images and has a wide field of view (FOV). The conventional stereo apporach based on perspective camera model cannot be directly applied and instead we used a spherical camera model to depict the relation between 3D point and its corresponding observation in the image. We implemented a system that can reconstruct the 3D scene using captures from two or more cameras. A GUI is also created to allow users to control the view perspective and obtain a better intuition of how the scene is rebuilt. Experiments showed that our reconstruction results well preserved the structure of the scene in the real world.