 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlight Demonstration and Model Validation of a Prototype Variable-Altitude Venus Aerobot
Nov 11, 2024



This paper details a significant milestone towards maturing a buoyant aerial robotic platform, or aerobot, for flight in the Venus clouds. We describe two flights of our subscale altitude-controlled aerobot, fabricated from the materials necessary to survive Venus conditions. During these flights over the Nevada Black Rock desert, the prototype flew at the identical atmospheric densities as 54 to 55 km cloud layer altitudes on Venus. We further describe a first-principle aerobot dynamics model which we validate against the Nevada flight data and subsequently employ to predict the performance of future aerobots on Venus. The aerobot discussed in this paper is under JPL development for an in-situ mission flying multiple circumnavigations of Venus, sampling the chemical and physical properties of the planet's atmosphere and also remotely sensing surface properties.
Mid-Air Helicopter Delivery at Mars Using a Jetpack
Mar 07, 2022
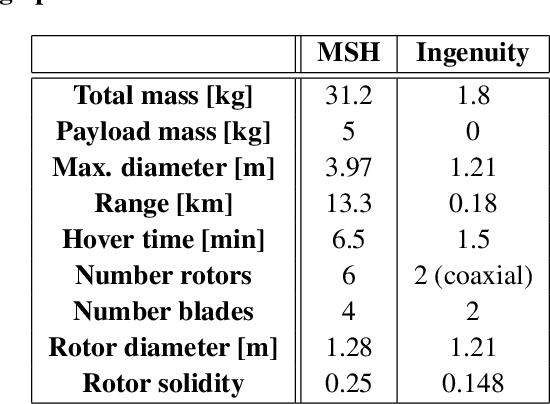
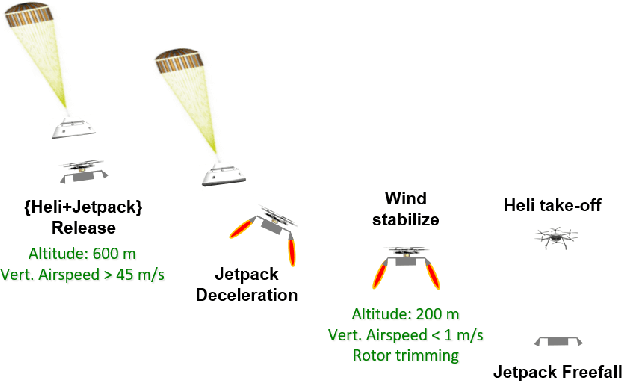
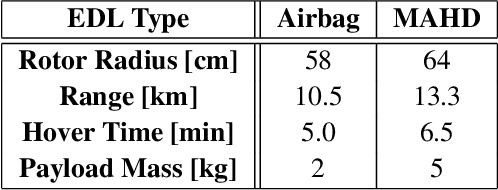
Mid-Air Helicopter Delivery (MAHD) is a new Entry, Descent and Landing (EDL) architecture to enable in situ mobility for Mars science at lower cost than previous missions. It uses a jetpack to slow down a Mars Science Helicopter (MSH) after separation from the backshell, and reach aerodynamic conditions suitable for helicopter take-off in mid air. For given aeroshell dimensions, only MAHD's lander-free approach leaves enough room in the aeroshell to accommodate the largest rotor option for MSH. This drastically improves flight performance, notably allowing +150\% increased science payload mass. Compared to heritage EDL approaches, the simpler MAHD architecture is also likely to reduce cost, and enables access to more hazardous and higher-elevation terrains on Mars. This paper introduces a design for the MAHD system architecture and operations. We present a mechanical configuration that fits both MSH and the jetpack within the 2.65-m Mars heritage aeroshell, and a jetpack control architecture which fully leverages the available helicopter avionics. We discuss preliminary numerical models of the flow dynamics resulting from the interaction between the jets, the rotors and the side winds. We define a force-torque sensing architecture capable of handling the wind and trimming the rotors to prepare for safe take-off. Finally, we analyze the dynamic environment and closed-loop control simulation results to demonstrate the preliminary feasibility of MAHD.