 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstrained Language Models Yield Few-Shot Semantic Parsers
Apr 18, 2021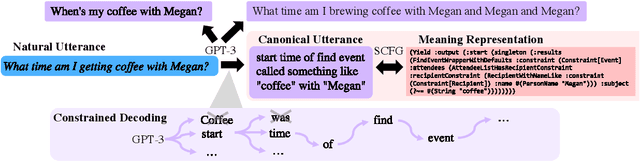

We explore the use of large pretrained language models as few-shot semantic parsers. The goal in semantic parsing is to generate a structured meaning representation given a natural language input. However, language models are trained to generate natural language. To bridge the gap, we use language models to paraphrase inputs into a controlled sublanguage resembling English that can be automatically mapped to a target meaning representation. With a small amount of data and very little code to convert into English-like representations, we provide a blueprint for rapidly bootstrapping semantic parsers and demonstrate good performance on multiple tasks.
A Programming Language With a POMDP Inside
Aug 31, 2016
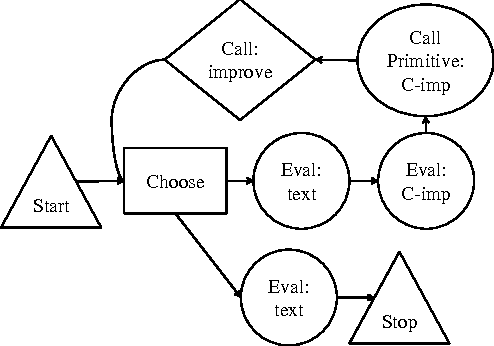
We present POAPS, a novel planning system for defining Partially Observable Markov Decision Processes (POMDPs) that abstracts away from POMDP details for the benefit of non-expert practitioners. POAPS includes an expressive adaptive programming language based on Lisp that has constructs for choice points that can be dynamically optimized. Non-experts can use our language to write adaptive programs that have partially observable components without needing to specify belief/hidden states or reason about probabilities. POAPS is also a compiler that defines and performs the transformation of any program written in our language into a POMDP with control knowledge. We demonstrate the generality and power of POAPS in the rapidly growing domain of human computation by describing its expressiveness and simplicity by writing several POAPS programs for common crowdsourcing tasks.
Metareasoning for Planning Under Uncertainty
May 03, 2015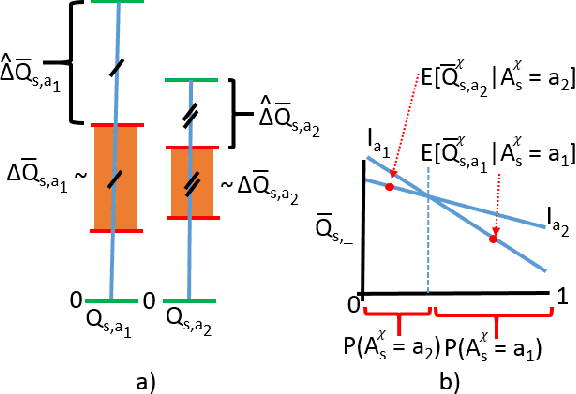
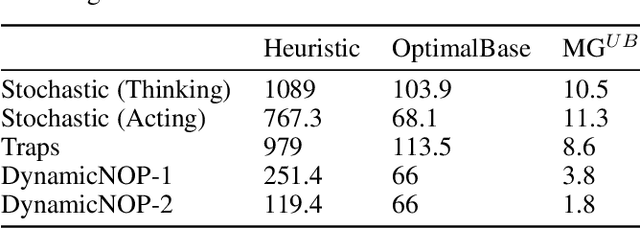
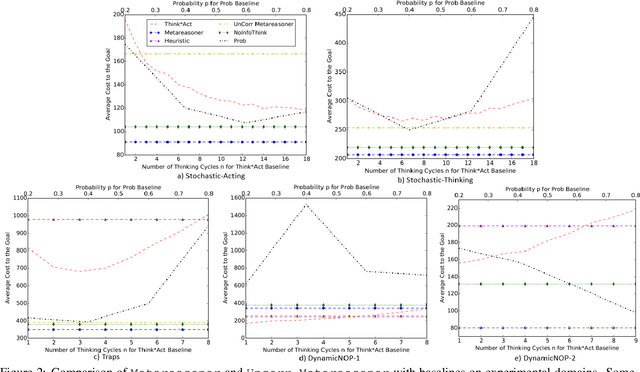
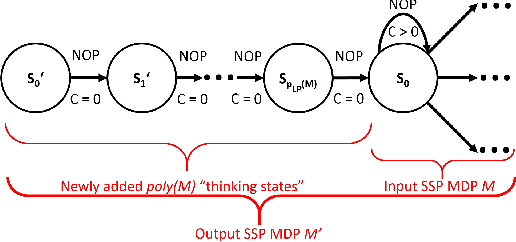
The conventional model for online planning under uncertainty assumes that an agent can stop and plan without incurring costs for the time spent planning. However, planning time is not free in most real-world settings. For example, an autonomous drone is subject to nature's forces, like gravity, even while it thinks, and must either pay a price for counteracting these forces to stay in place, or grapple with the state change caused by acquiescing to them. Policy optimization in these settings requires metareasoning---a process that trades off the cost of planning and the potential policy improvement that can be achieved. We formalize and analyze the metareasoning problem for Markov Decision Processes (MDPs). Our work subsumes previously studied special cases of metareasoning and shows that in the general case, metareasoning is at most polynomially harder than solving MDPs with any given algorithm that disregards the cost of thinking. For reasons we discuss, optimal general metareasoning turns out to be impractical, motivating approximations. We present approximate metareasoning procedures which rely on special properties of the BRTDP planning algorithm and explore the effectiveness of our methods on a variety of problems.
Crowdsourcing Control: Moving Beyond Multiple Choice
Oct 16, 2012To ensure quality results from crowdsourced tasks, requesters often aggregate worker responses and use one of a plethora of strategies to infer the correct answer from the set of noisy responses. However, all current models assume prior knowledge of all possible outcomes of the task. While not an unreasonable assumption for tasks that can be posited as multiple-choice questions (e.g. n-ary classification), we observe that many tasks do not naturally fit this paradigm, but instead demand a free-response formulation where the outcome space is of infinite size (e.g. audio transcription). We model such tasks with a novel probabilistic graphical model, and design and implement LazySusan, a decision-theoretic controller that dynamically requests responses as necessary in order to infer answers to these tasks. We also design an EM algorithm to jointly learn the parameters of our model while inferring the correct answers to multiple tasks at a time. Live experiments on Amazon Mechanical Turk demonstrate the superiority of LazySusan at solving SAT Math questions, eliminating 83.2% of the error and achieving greater net utility compared to the state-ofthe-art strategy, majority-voting. We also show in live experiments that our EM algorithm outperforms majority-voting on a visualization task that we design.