 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular Robot and Landmark Localisation Using Relative Bearing Measurements
Jul 24, 2025



In this paper we propose a modular nonlinear least squares filtering approach for systems composed of independent subsystems. The state and error covariance estimate of each subsystem is updated independently, even when a relative measurement simultaneously depends on the states of multiple subsystems. We integrate the Covariance Intersection (CI) algorithm as part of our solution in order to prevent double counting of information when subsystems share estimates with each other. An alternative derivation of the CI algorithm based on least squares estimation makes this integration possible. We particularise the proposed approach to the robot-landmark localization problem. In this problem, noisy measurements of the bearing angle to a stationary landmark position measured relative to the SE(2) pose of a moving robot couple the estimation problems for the robot pose and the landmark position. In a randomized simulation study, we benchmark the proposed modular method against a monolithic joint state filter to elucidate their respective trade-offs. In this study we also include variants of the proposed method that achieve a graceful degradation of performance with reduced communication and bandwidth requirements.
An Event-Triggered Framework for Trust-Mediated Human-Autonomy Interaction
Dec 12, 2024



Inspired by the increased cooperation between humans and autonomous systems, we present a new hybrid systems framework capturing the interconnected dynamics underlying these interactions. The framework accommodates models arising from both the autonomous systems and cognitive psychology literature in order to represent key elements such as human trust in the autonomous system. The intermittent nature of human interactions are incorporated by asynchronous event-triggered sampling at the framework's human-autonomous system interfaces. We illustrate important considerations for tuning framework parameters by investigating a practical application to an autonomous robotic swarm search and rescue scenario. In this way, we demonstrate how the proposed framework may assist in designing more efficient and effective interactions between humans and autonomous systems.
Temporal Planning via Interval Logic Satisfiability for Autonomous Systems
Jun 14, 2024



Many automated planning methods and formulations rely on suitably designed abstractions or simplifications of the constrained dynamics associated with agents to attain computational scalability. We consider formulations of temporal planning where intervals are associated with both action and fluent atoms, and relations between these are given as sentences in Allen's Interval Logic. We propose a notion of planning graphs that can account for complex concurrency relations between actions and fluents as a Constraint Programming (CP) model. We test an implementation of our algorithm on a state-of-the-art framework for CP and compare it with PDDL 2.1 planners that capture plans requiring complex concurrent interactions between agents. We demonstrate our algorithm outperforms existing PDDL 2.1 planners in the case studies. Still, scalability remains challenging when plans must comply with intricate concurrent interactions and the sequencing of actions.
Gradient-enhanced deep Gaussian processes for multifidelity modelling
Feb 25, 2024



Multifidelity models integrate data from multiple sources to produce a single approximator for the underlying process. Dense low-fidelity samples are used to reduce interpolation error, while sparse high-fidelity samples are used to compensate for bias or noise in the low-fidelity samples. Deep Gaussian processes (GPs) are attractive for multifidelity modelling as they are non-parametric, robust to overfitting, perform well for small datasets, and, critically, can capture nonlinear and input-dependent relationships between data of different fidelities. Many datasets naturally contain gradient data, especially when they are generated by computational models that are compatible with automatic differentiation or have adjoint solutions. Principally, this work extends deep GPs to incorporate gradient data. We demonstrate this method on an analytical test problem and a realistic partial differential equation problem, where we predict the aerodynamic coefficients of a hypersonic flight vehicle over a range of flight conditions and geometries. In both examples, the gradient-enhanced deep GP outperforms a gradient-enhanced linear GP model and their non-gradient-enhanced counterparts.
Collaborative Bearing Estimation Using Set Membership Methods
Apr 17, 2023



We consider the problem of collaborative bearing estimation using a method with historic roots in set theoretic estimation techniques. We refer to this method as the Convex Combination Ellipsoid (CCE) method and show that it provides a less conservative covariance estimate than the well known Covariance Intersection (CI) method. The CCE method does not introduce additional uncertainty that was not already present in the prior estimates. Using our proposed approach for collaborative bearing estimation, the nonlinearity of the bearing measurement is captured as an uncertainty ellipsoid thereby avoiding the need for linearization or approximation via sampling procedures. Simulations are undertaken to evaluate the relative performance of the collaborative bearing estimation solution using the proposed (CCE) and typical (CI) methods.
Lazy Probabilistic Roadmaps Revisited
Sep 28, 2022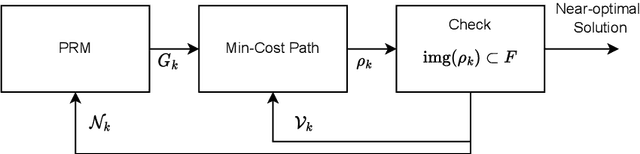
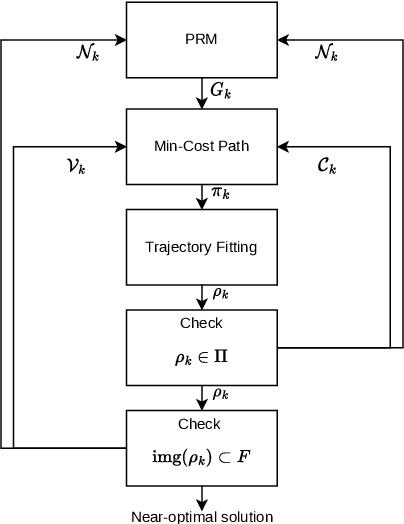
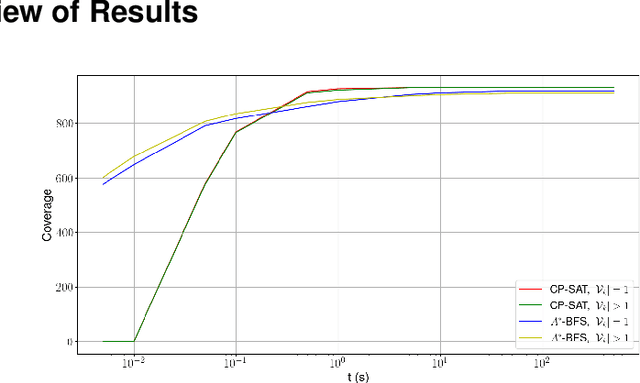
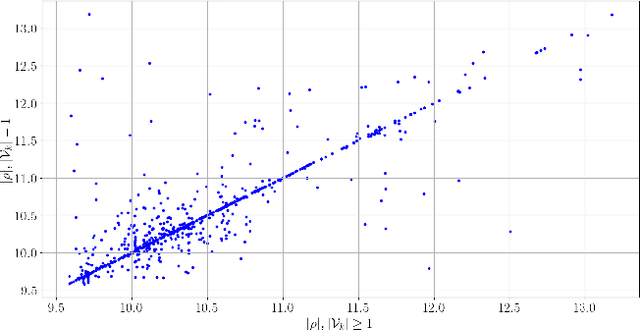
This paper describes a revision of the classic Lazy Probabilistic Roadmaps algorithm (Lazy PRM), that results from pairing PRM and a novel Branch-and-Cut (BC) algorithm. Cuts are dynamically generated constraints that are imposed on minimum cost paths over the geometric graphs selected by PRM. Cuts eliminate paths that cannot be mapped into smooth plans that satisfy suitably defined kinematic constraints. We generate candidate smooth plans by fitting splines to vertices in minimum-cost path. Plans are validated with a recently proposed algorithm that maps them into finite traces, without need to choose a fixed discretization step. Trace elements exactly describe when plans cross constraint boundaries modulo arithmetic precision. We evaluate several planners using our methods over the recently proposed BARN benchmark, and we report evidence of the scalability of our approach.
Data-driven Predictive Tracking Control based on Koopman Operators
Aug 25, 2022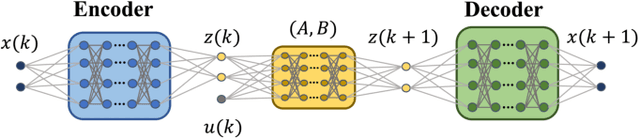
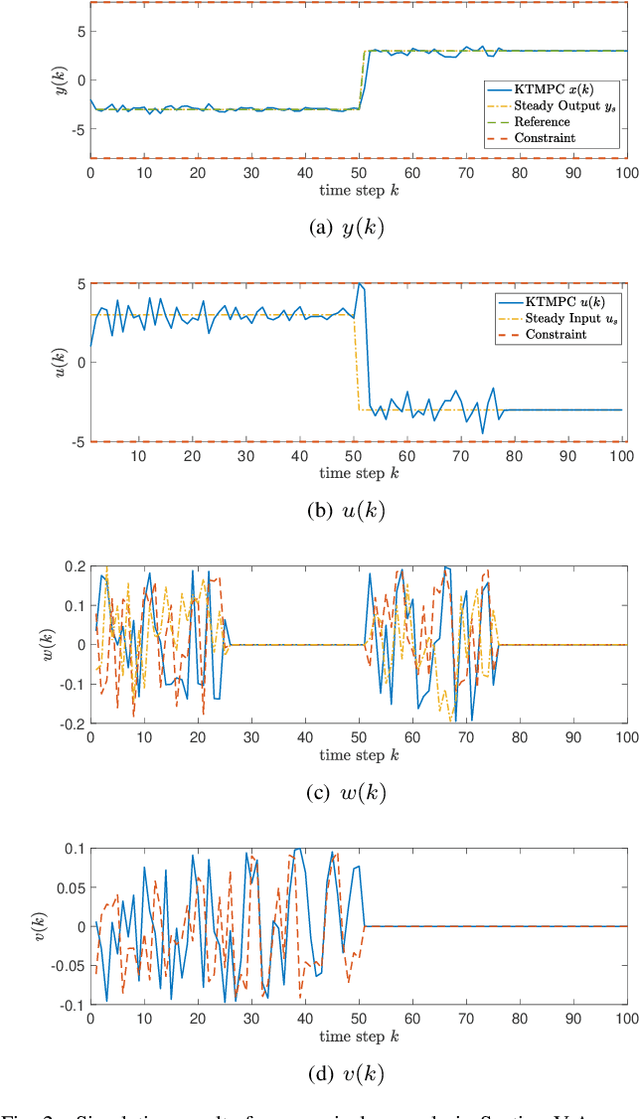
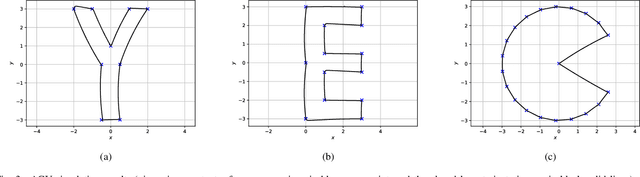
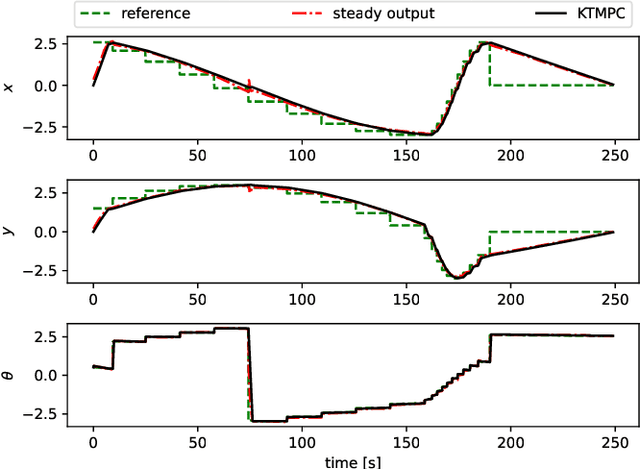
We seek to combine the nonlinear modeling capabilities of a wide class of neural networks with the safety guarantees of model predictive control (MPC) in a rigorous and online computationally tractable framework. The class of networks considered can be captured using Koopman operators, and are integrated into a Koopman-based tracking MPC (KTMPC) for nonlinear systems to track piecewise constant references. The effect of model mismatch between original nonlinear dynamics and its trained Koopman linear model is handled by using a constraint tightening approach in the proposed tracking MPC strategy. By choosing two Lyapunov candidate functions, we prove that solution is recursively feasible and input-to-state stable to a neighborhood of both online and offline optimal reachable steady outputs in the presence of bounded modeling errors. Finally, we show the results of a numerical example and an application of autonomous ground vehicle to track given references.
Probabilistic Data Association for Semantic SLAM at Scale
Feb 25, 2022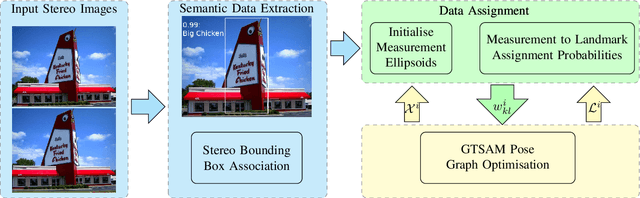
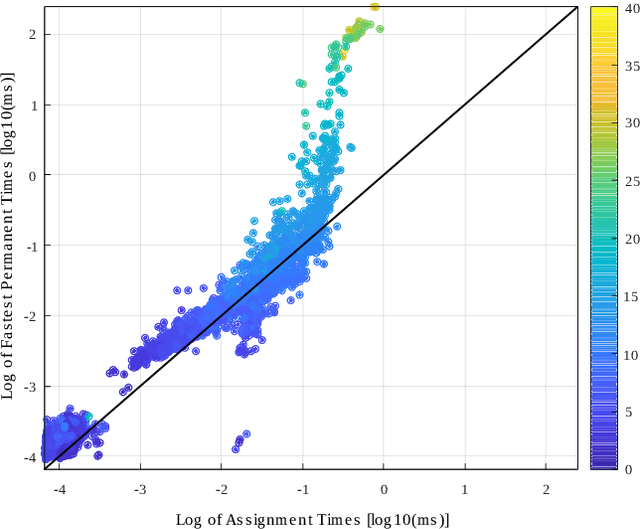
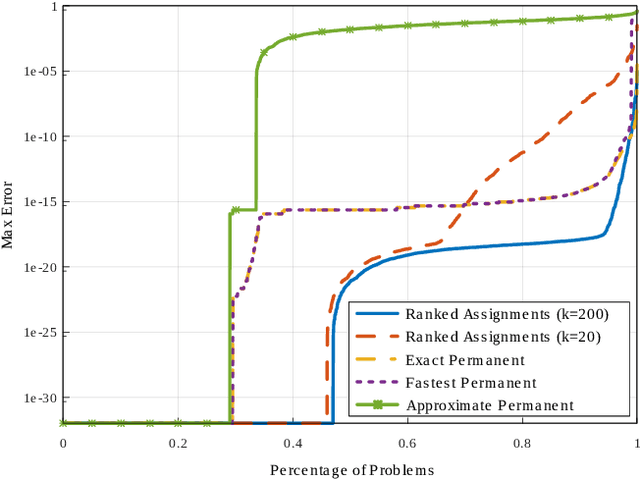
With advances in image processing and machine learning, it is now feasible to incorporate semantic information into the problem of simultaneous localisation and mapping (SLAM). Previously, SLAM was carried out using lower level geometric features (points, lines, and planes) which are often view-point dependent and error prone in visually repetitive environments. Semantic information can improve the ability to recognise previously visited locations, as well as maintain sparser maps for long term SLAM applications. However, SLAM in repetitive environments has the critical problem of assigning measurements to the landmarks which generated them. In this paper, we use k-best assignment enumeration to compute marginal assignment probabilities for each measurement landmark pair, in real time. We present numerical studies on the KITTI dataset to demonstrate the effectiveness and speed of the proposed framework.
The Use of Implicit Human Motor Behaviour in the Online Personalisation of Prosthetic Interfaces
Mar 02, 2020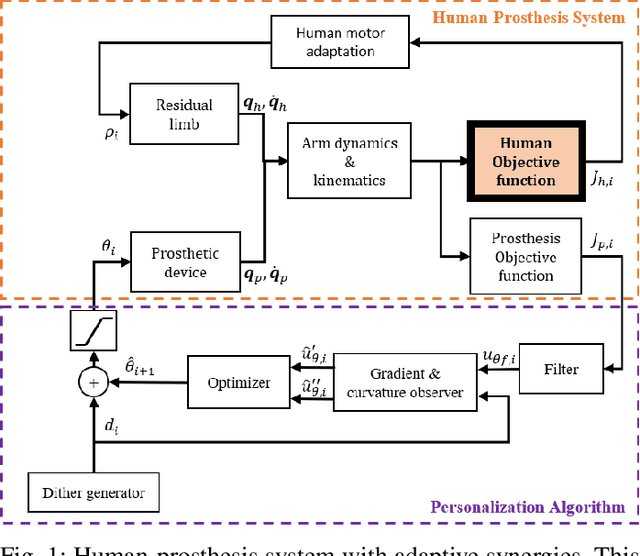
In previous work, the authors proposed a data-driven optimisation algorithm for the personalisation of human-prosthetic interfaces, demonstrating the possibility of adapting prosthesis behaviour to its user while the user performs tasks with it. This method requires that the human and the prosthesis personalisation algorithm have same pre-defined objective function. This was previously ensured by providing the human with explicit feedback on what the objective function is. However, constantly displaying this information to the prosthesis user is impractical. Moreover, the method utilised task information in the objective function which may not be available from the wearable sensors typically used in prosthetic applications. In this work, the previous approach is extended to use a prosthesis objective function based on implicit human motor behaviour, which represents able-bodied human motor control and is measureable using wearable sensors. The approach is tested in a hardware implementation of the personalisation algorithm on a prosthetic elbow, where the prosthetic objective function is a function of upper-body compensation, and is measured using wearable IMUs. Experimental results on able-bodied subjects using a supernumerary prosthetic elbow mounted on an elbow orthosis suggest that it is possible to use a prosthesis objective function which is implicit in human behaviour to achieve collaboration without providing explicit feedback to the human, motivating further studies.
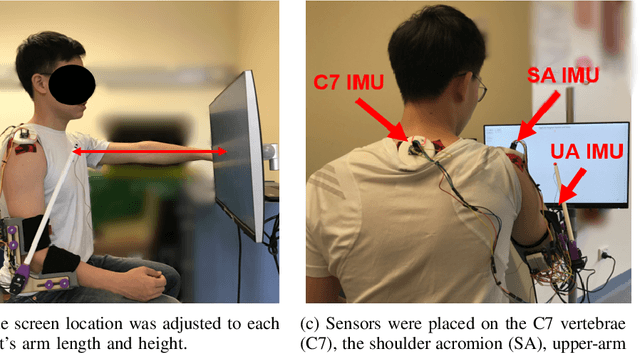
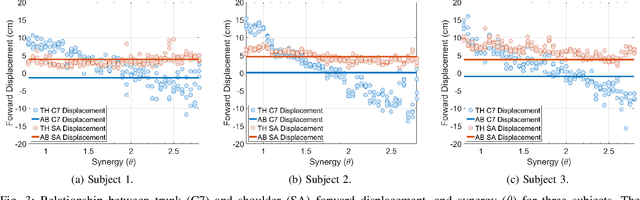
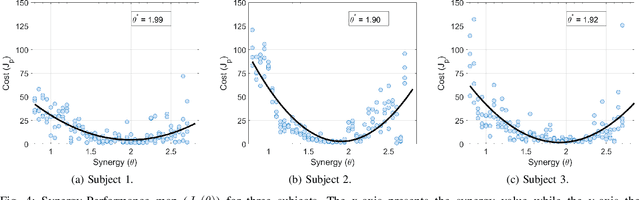
Task-space Synergies for Reaching using Upper-limb Prostheses
Feb 19, 2020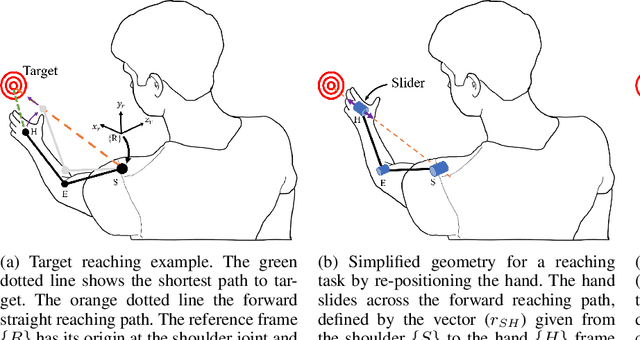
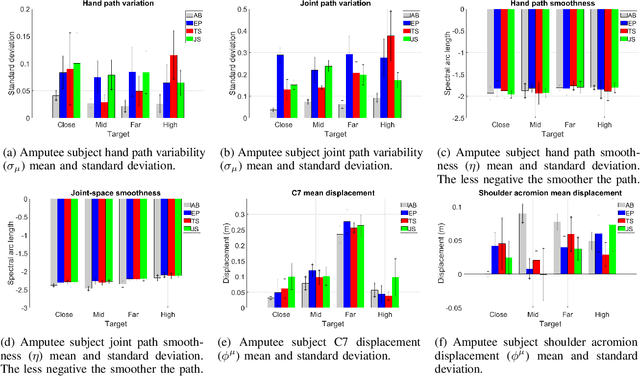
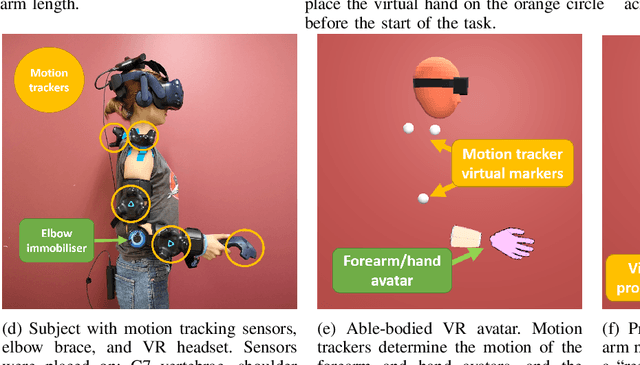
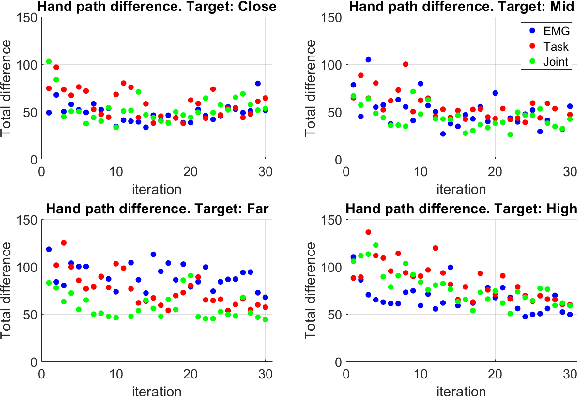
Synergistic prostheses enable the coordinated movement of the human-prosthetic arm, as required by activities of daily living. This is achieved by coupling the motion of the prosthesis to the human command, such as residual limb movement in motion-based interfaces. Previous studies demonstrated that developing human-prosthetic synergies in joint-space must consider individual motor behaviour and the intended task to be performed, requiring personalisation and task calibration. In this work, an alternative synergy-based strategy, utilising a synergistic relationship expressed in task-space, is proposed. This task-space synergy has the potential to replace the need for personalisation and task calibration with a model-based approach requiring knowledge of the individual user's arm kinematics, the anticipated hand motion during the task and voluntary information from the prosthetic user. The proposed method is compared with surface electromyography-based and joint-space synergy-based prosthetic interfaces in a study of motor behaviour and task performance on able-bodied subjects using a VR-based transhumeral prosthesis. Experimental results showed that for a set of forward reaching tasks the proposed task-space synergy achieves comparable performance to joint-space synergies and superior to conventional surface electromyography. Case study results with an amputee subject motivate the further development of the proposed task-space synergy method.