 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDreamKG: A KG-Augmented Conversational System for People Experiencing Homelessness
Apr 13, 2026People experiencing homelessness (PEH) face substantial barriers to accessing timely, accurate information about community services. DreamKG addresses this through a knowledge graph-augmented conversational system that grounds responses in verified, up-to-date data about Philadelphia organizations, services, locations, and hours. Unlike standard large language models (LLMs) prone to hallucinations, DreamKG combines Neo4j knowledge graphs with structured query understanding to handle location-aware and time-sensitive queries reliably. The system performs spatial reasoning for distance-based recommendations and temporal filtering for operating hours. Preliminary evaluation shows 59% superiority over Google Search AI on relevant queries and 84% rejection of irrelevant queries. This demonstration highlights the potential of hybrid architectures that combines LLM flexibility with knowledge graph reliability to improve service accessibility for vulnerable populations effectively.
Online Multi-Object Tracking with Instance-Aware Tracker and Dynamic Model Refreshment
Feb 21, 2019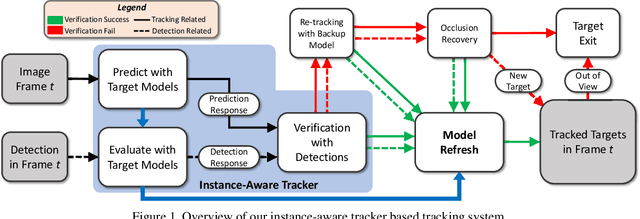
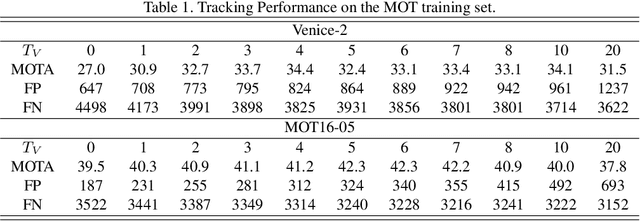
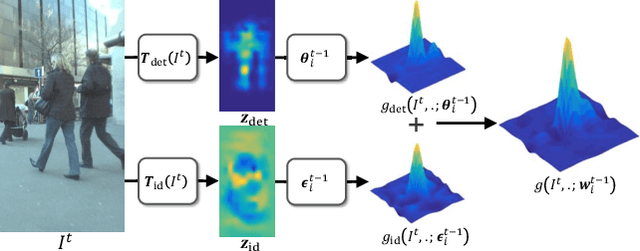
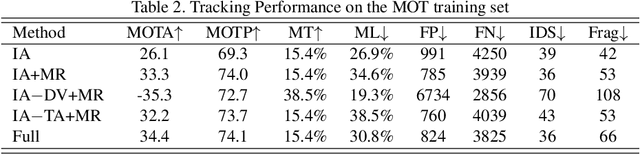
Recent progresses in model-free single object tracking (SOT) algorithms have largely inspired applying SOT to \emph{multi-object tracking} (MOT) to improve the robustness as well as relieving dependency on external detector. However, SOT algorithms are generally designed for distinguishing a target from its environment, and hence meet problems when a target is spatially mixed with similar objects as observed frequently in MOT. To address this issue, in this paper we propose an instance-aware tracker to integrate SOT techniques for MOT by encoding awareness both within and between target models. In particular, we construct each target model by fusing information for distinguishing target both from background and other instances (tracking targets). To conserve uniqueness of all target models, our instance-aware tracker considers response maps from all target models and assigns spatial locations exclusively to optimize the overall accuracy. Another contribution we make is a dynamic model refreshing strategy learned by a convolutional neural network. This strategy helps to eliminate initialization noise as well as to adapt to the variation of target size and appearance. To show the effectiveness of the proposed approach, it is evaluated on the popular MOT15 and MOT16 challenge benchmarks. On both benchmarks, our approach achieves the best overall performances in comparison with published results.