 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPU-IMR: Self-supervised Arbitrary-scale Point Cloud Upsampling via Iterative Mask-recovery Network
Feb 26, 2025Point cloud upsampling aims to generate dense and uniformly distributed point sets from sparse point clouds. Existing point cloud upsampling methods typically approach the task as an interpolation problem. They achieve upsampling by performing local interpolation between point clouds or in the feature space, then regressing the interpolated points to appropriate positions. By contrast, our proposed method treats point cloud upsampling as a global shape completion problem. Specifically, our method first divides the point cloud into multiple patches. Then, a masking operation is applied to remove some patches, leaving visible point cloud patches. Finally, our custom-designed neural network iterative completes the missing sections of the point cloud through the visible parts. During testing, by selecting different mask sequences, we can restore various complete patches. A sufficiently dense upsampled point cloud can be obtained by merging all the completed patches. We demonstrate the superior performance of our method through both quantitative and qualitative experiments, showing overall superiority against both existing self-supervised and supervised methods.
Weighted Poisson-disk Resampling on Large-Scale Point Clouds
Dec 12, 2024



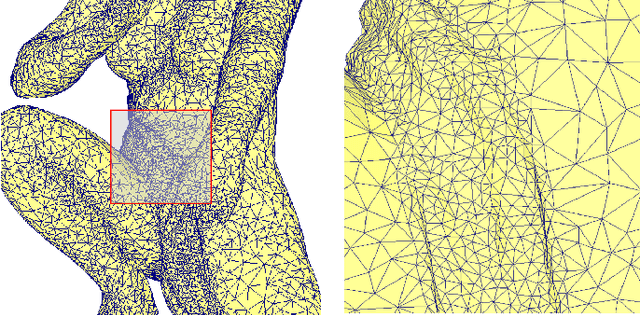
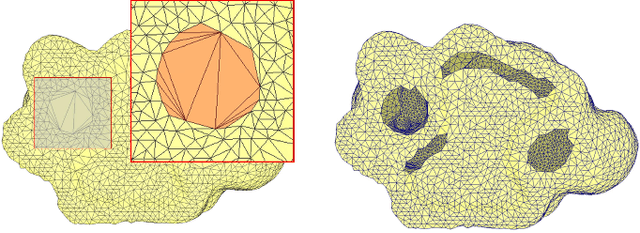
For large-scale point cloud processing, resampling takes the important role of controlling the point number and density while keeping the geometric consistency. % in related tasks. However, current methods cannot balance such different requirements. Particularly with large-scale point clouds, classical methods often struggle with decreased efficiency and accuracy. To address such issues, we propose a weighted Poisson-disk (WPD) resampling method to improve the usability and efficiency for the processing. We first design an initial Poisson resampling with a voxel-based estimation strategy. It is able to estimate a more accurate radius of the Poisson-disk while maintaining high efficiency. Then, we design a weighted tangent smoothing step to further optimize the Voronoi diagram for each point. At the same time, sharp features are detected and kept in the optimized results with isotropic property. Finally, we achieve a resampling copy from the original point cloud with the specified point number, uniform density, and high-quality geometric consistency. Experiments show that our method significantly improves the performance of large-scale point cloud resampling for different applications, and provides a highly practical solution.
GSTran: Joint Geometric and Semantic Coherence for Point Cloud Segmentation
Aug 21, 2024



Learning meaningful local and global information remains a challenge in point cloud segmentation tasks. When utilizing local information, prior studies indiscriminately aggregates neighbor information from different classes to update query points, potentially compromising the distinctive feature of query points. In parallel, inaccurate modeling of long-distance contextual dependencies when utilizing global information can also impact model performance. To address these issues, we propose GSTran, a novel transformer network tailored for the segmentation task. The proposed network mainly consists of two principal components: a local geometric transformer and a global semantic transformer. In the local geometric transformer module, we explicitly calculate the geometric disparity within the local region. This enables amplifying the affinity with geometrically similar neighbor points while suppressing the association with other neighbors. In the global semantic transformer module, we design a multi-head voting strategy. This strategy evaluates semantic similarity across the entire spatial range, facilitating the precise capture of contextual dependencies. Experiments on ShapeNetPart and S3DIS benchmarks demonstrate the effectiveness of the proposed method, showing its superiority over other algorithms. The code is available at https://github.com/LAB123-tech/GSTran.
Palette-based Color Transfer between Images
May 14, 2024As an important subtopic of image enhancement, color transfer aims to enhance the color scheme of a source image according to a reference one while preserving the semantic context. To implement color transfer, the palette-based color mapping framework was proposed. \textcolor{black}{It is a classical solution that does not depend on complex semantic analysis to generate a new color scheme. However, the framework usually requires manual settings, blackucing its practicality.} The quality of traditional palette generation depends on the degree of color separation. In this paper, we propose a new palette-based color transfer method that can automatically generate a new color scheme. With a redesigned palette-based clustering method, pixels can be classified into different segments according to color distribution with better applicability. {By combining deep learning-based image segmentation and a new color mapping strategy, color transfer can be implemented on foreground and background parts independently while maintaining semantic consistency.} The experimental results indicate that our method exhibits significant advantages over peer methods in terms of natural realism, color consistency, generality, and robustness.
GCFAgg: Global and Cross-view Feature Aggregation for Multi-view Clustering
May 11, 2023Multi-view clustering can partition data samples into their categories by learning a consensus representation in unsupervised way and has received more and more attention in recent years. However, most existing deep clustering methods learn consensus representation or view-specific representations from multiple views via view-wise aggregation way, where they ignore structure relationship of all samples. In this paper, we propose a novel multi-view clustering network to address these problems, called Global and Cross-view Feature Aggregation for Multi-View Clustering (GCFAggMVC). Specifically, the consensus data presentation from multiple views is obtained via cross-sample and cross-view feature aggregation, which fully explores the complementary ofsimilar samples. Moreover, we align the consensus representation and the view-specific representation by the structure-guided contrastive learning module, which makes the view-specific representations from different samples with high structure relationship similar. The proposed module is a flexible multi-view data representation module, which can be also embedded to the incomplete multi-view data clustering task via plugging our module into other frameworks. Extensive experiments show that the proposed method achieves excellent performance in both complete multi-view data clustering tasks and incomplete multi-view data clustering tasks.
KSS-ICP: Point Cloud Registration based on Kendall Shape Space
Nov 05, 2022Point cloud registration is a popular topic which has been widely used in 3D model reconstruction, location, and retrieval. In this paper, we propose a new registration method, KSS-ICP, to address the rigid registration task in Kendall shape space (KSS) with Iterative Closest Point (ICP). The KSS is a quotient space that removes influences of translations, scales, and rotations for shape feature-based analysis. Such influences can be concluded as the similarity transformations that do not change the shape feature. The point cloud representation in KSS is invariant to similarity transformations. We utilize such property to design the KSS-ICP for point cloud registration. To tackle the difficulty to achieve the KSS representation in general, the proposed KSS-ICP formulates a practical solution that does not require complex feature analysis, data training, and optimization. With a simple implementation, KSS-ICP achieves more accurate registration from point clouds. It is robust to similarity transformation, non-uniform density, noise, and defective parts. Experiments show that KSS-ICP has better performance than the state of the art.
Voxel Structure-based Mesh Reconstruction from a 3D Point Cloud
Apr 23, 2021

Mesh reconstruction from a 3D point cloud is an important topic in the fields of computer graphic, computer vision, and multimedia analysis. In this paper, we propose a voxel structure-based mesh reconstruction framework. It provides the intrinsic metric to improve the accuracy of local region detection. Based on the detected local regions, an initial reconstructed mesh can be obtained. With the mesh optimization in our framework, the initial reconstructed mesh is optimized into an isotropic one with the important geometric features such as external and internal edges. The experimental results indicate that our framework shows great advantages over peer ones in terms of mesh quality, geometric feature keeping, and processing speed.