 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Detection: Exploring Evidence-based Multi-Agent Debate for Misinformation Intervention and Persuasion
Nov 10, 2025Multi-agent debate (MAD) frameworks have emerged as promising approaches for misinformation detection by simulating adversarial reasoning. While prior work has focused on detection accuracy, it overlooks the importance of helping users understand the reasoning behind factual judgments and develop future resilience. The debate transcripts generated during MAD offer a rich but underutilized resource for transparent reasoning. In this study, we introduce ED2D, an evidence-based MAD framework that extends previous approach by incorporating factual evidence retrieval. More importantly, ED2D is designed not only as a detection framework but also as a persuasive multi-agent system aimed at correcting user beliefs and discouraging misinformation sharing. We compare the persuasive effects of ED2D-generated debunking transcripts with those authored by human experts. Results demonstrate that ED2D outperforms existing baselines across three misinformation detection benchmarks. When ED2D generates correct predictions, its debunking transcripts exhibit persuasive effects comparable to those of human experts; However, when ED2D misclassifies, its accompanying explanations may inadvertently reinforce users'misconceptions, even when presented alongside accurate human explanations. Our findings highlight both the promise and the potential risks of deploying MAD systems for misinformation intervention. We further develop a public community website to help users explore ED2D, fostering transparency, critical thinking, and collaborative fact-checking.
Debate-to-Detect: Reformulating Misinformation Detection as a Real-World Debate with Large Language Models
May 24, 2025



The proliferation of misinformation in digital platforms reveals the limitations of traditional detection methods, which mostly rely on static classification and fail to capture the intricate process of real-world fact-checking. Despite advancements in Large Language Models (LLMs) that enhance automated reasoning, their application to misinformation detection remains hindered by issues of logical inconsistency and superficial verification. In response, we introduce Debate-to-Detect (D2D), a novel Multi-Agent Debate (MAD) framework that reformulates misinformation detection as a structured adversarial debate. Inspired by fact-checking workflows, D2D assigns domain-specific profiles to each agent and orchestrates a five-stage debate process, including Opening Statement, Rebuttal, Free Debate, Closing Statement, and Judgment. To transcend traditional binary classification, D2D introduces a multi-dimensional evaluation mechanism that assesses each claim across five distinct dimensions: Factuality, Source Reliability, Reasoning Quality, Clarity, and Ethics. Experiments with GPT-4o on two fakenews datasets demonstrate significant improvements over baseline methods, and the case study highlight D2D's capability to iteratively refine evidence while improving decision transparency, representing a substantial advancement towards robust and interpretable misinformation detection. The code will be open-sourced in a future release.
Label-free Prediction of Vascular Connectivity in Perfused Microvascular Networks in vitro
Feb 25, 2025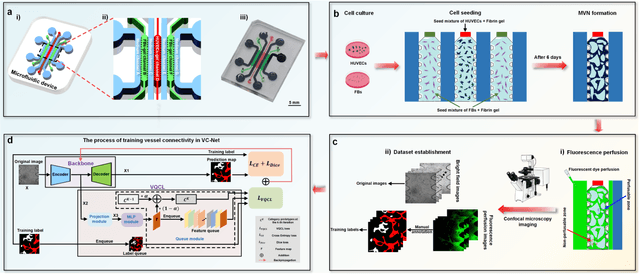
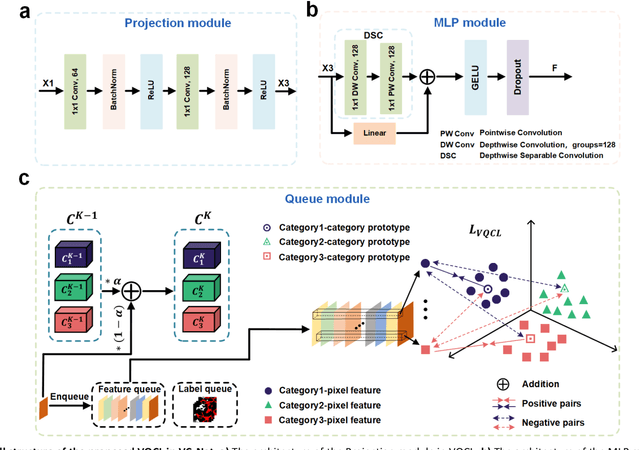
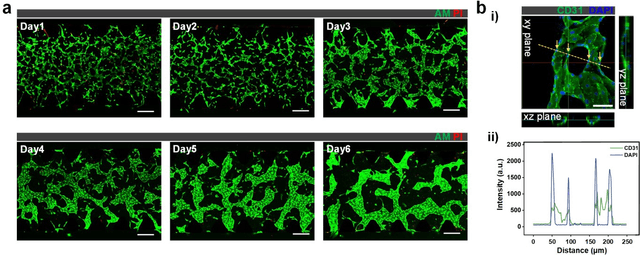
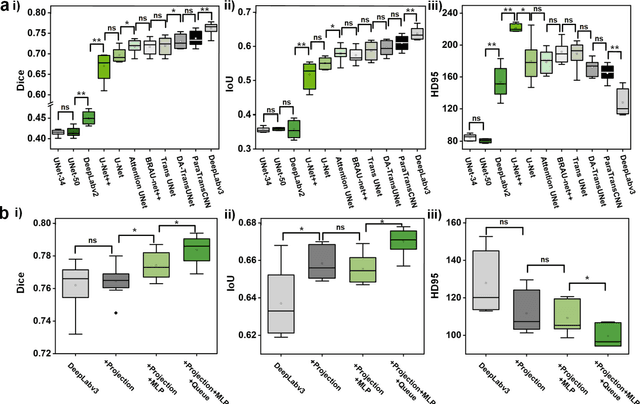
Continuous monitoring and in-situ assessment of microvascular connectivity have significant implications for culturing vascularized organoids and optimizing the therapeutic strategies. However, commonly used methods for vascular connectivity assessment heavily rely on fluorescent labels that may either raise biocompatibility concerns or interrupt the normal cell growth process. To address this issue, a Vessel Connectivity Network (VC-Net) was developed for label-free assessment of vascular connectivity. To validate the VC-Net, microvascular networks (MVNs) were cultured in vitro and their microscopic images were acquired at different culturing conditions as a training dataset. The VC-Net employs a Vessel Queue Contrastive Learning (VQCL) method and a class imbalance algorithm to address the issues of limited sample size, indistinctive class features and imbalanced class distribution in the dataset. The VC-Net successfully evaluated the vascular connectivity with no significant deviation from that by fluorescence imaging. In addition, the proposed VC-Net successfully differentiated the connectivity characteristics between normal and tumor-related MVNs. In comparison with those cultured in the regular microenvironment, the averaged connectivity of MVNs cultured in the tumor-related microenvironment decreased by 30.8%, whereas the non-connected area increased by 37.3%. This study provides a new avenue for label-free and continuous assessment of organoid or tumor vascularization in vitro.
VascularPilot3D: Toward a 3D fully autonomous navigation for endovascular robotics
May 15, 2024This research reports VascularPilot3D, the first 3D fully autonomous endovascular robot navigation system. As an exploration toward autonomous guidewire navigation, VascularPilot3D is developed as a complete navigation system based on intra-operative imaging systems (fluoroscopic X-ray in this study) and typical endovascular robots. VascularPilot3D adopts previously researched fast 3D-2D vessel registration algorithms and guidewire segmentation methods as its perception modules. We additionally propose three modules: a topology-constrained 2D-3D instrument end-point lifting method, a tree-based fast path planning algorithm, and a prior-free endovascular navigation strategy. VascularPilot3D is compatible with most mainstream endovascular robots. Ex-vivo experiments validate that VascularPilot3D achieves 100% success rate among 25 trials. It reduces the human surgeon's overall control loops by 18.38%. VascularPilot3D is promising for general clinical autonomous endovascular navigations.