 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearned Visual Navigation for Under-Canopy Agricultural Robots
Jul 06, 2021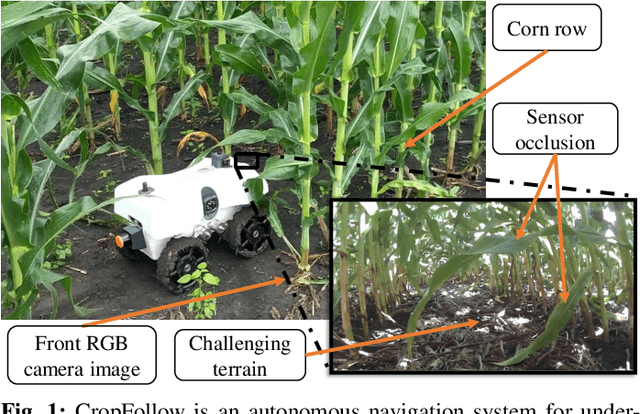
We describe a system for visually guided autonomous navigation of under-canopy farm robots. Low-cost under-canopy robots can drive between crop rows under the plant canopy and accomplish tasks that are infeasible for over-the-canopy drones or larger agricultural equipment. However, autonomously navigating them under the canopy presents a number of challenges: unreliable GPS and LiDAR, high cost of sensing, challenging farm terrain, clutter due to leaves and weeds, and large variability in appearance over the season and across crop types. We address these challenges by building a modular system that leverages machine learning for robust and generalizable perception from monocular RGB images from low-cost cameras, and model predictive control for accurate control in challenging terrain. Our system, CropFollow, is able to autonomously drive 485 meters per intervention on average, outperforming a state-of-the-art LiDAR based system (286 meters per intervention) in extensive field testing spanning over 25 km.