 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Modulation Scheme Based on the Kramers--Kronig Relations for Optical IM/DD Systems
Jan 20, 2025



The ever-growing demand for higher data rates in optical communication systems necessitates the development of advanced modulation formats capable of significantly enhancing system performance. In this work, we propose a novel modulation format derived from the Kramers--Kronig relations. This scheme effectively reduces the complexity of digital filtering and alleviates the demands on the digital-to-analog converter, offering a practical solution for high speed optical communication. The proposed modulation format was rigorously validated through experimental investigations using an optical wireless link. The results demonstrate a notable improvement in bit error rate (BER) performance and receiver sensitivity compared to PAM-4 and CAP-16 modulation schemes, with enhancements of 0.6 dB and 1.5 dB in receiver sensitivity, respectively. These improvements enable higher data transmission rates, positioning the Kramers--Kronig relations-based modulation format as a promising alternative to existing modulation techniques. Its potential to enhance the efficiency and capacity of optical communication systems is clearly evident. Future work will focus on extending its application to more complex scenarios, such as high-speed underwater optical communication systems, where advanced modulation formats are critical for overcoming bandwidth limitations.
Maximize the Foot Clearance for a Hopping Robotic Leg Considering Motor Saturation
Jul 30, 2021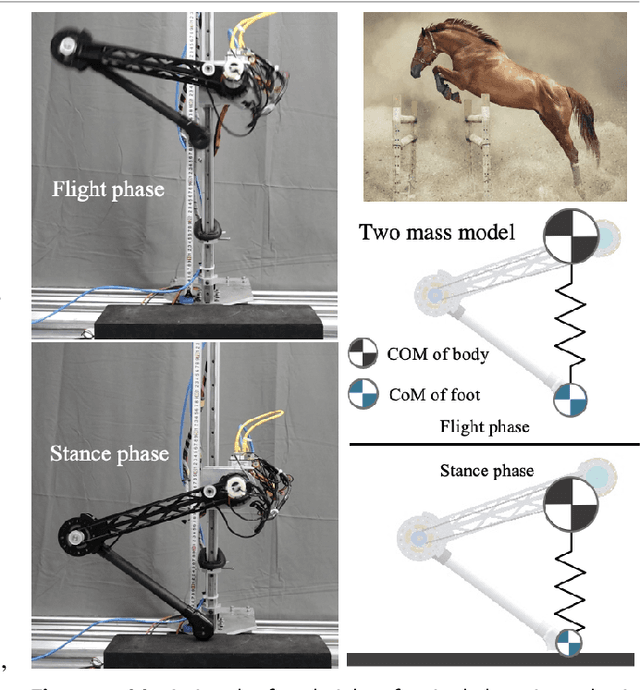
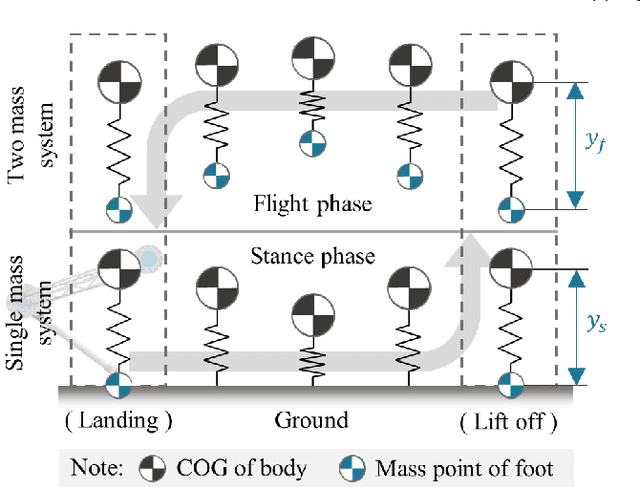
A hopping leg, no matter in legged animals or humans, usually behaves like a spring during the periodic hopping. Hopping like a spring is efficient and without the requirement of complicated control algorithms. Position and force control are two main methods to realize such a spring-like behaviour. The position control usually consumes the torque resources to ensure the position accuracy and compensate the tracking errors. In comparison, the force control strategy is able to maintain a high elasticity. Currently, the position and force control both leads to the discount of motor saturation ratio as well as the bandwidth of the control system, and thus attenuates the performance of the actuator. To augment the performance, this letter proposes a motor saturation strategy based on the force control to maximize the output torque of the actuator and realize the continuous hopping motion with natural dynamics. The proposed strategy is able to maximize the saturation ratio of motor and thus maximize the foot clearance of the single leg. The dynamics of the two-mass model is utilized to increase the force bandwidth and the performance of the actuator. A single leg with two degrees of freedom is designed as the experiment platform. The actuator consists of a powerful electric motor, a harmonic gear and encoder. The effectiveness of this method is verified through simulations and experiments using a robotic leg actuated by powerful high reduction ratio actuators.