 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Positive-Incentive Point Sampling in Neural Implicit Fields for Object Pose Estimation
Feb 23, 2026Learning neural implicit fields of 3D shapes is a rapidly emerging field that enables shape representation at arbitrary resolutions. Due to the flexibility, neural implicit fields have succeeded in many research areas, including shape reconstruction, novel view image synthesis, and more recently, object pose estimation. Neural implicit fields enable learning dense correspondences between the camera space and the object's canonical space-including unobserved regions in camera space-significantly boosting object pose estimation performance in challenging scenarios like highly occluded objects and novel shapes. Despite progress, predicting canonical coordinates for unobserved camera-space regions remains challenging due to the lack of direct observational signals. This necessitates heavy reliance on the model's generalization ability, resulting in high uncertainty. Consequently, densely sampling points across the entire camera space may yield inaccurate estimations that hinder the learning process and compromise performance. To alleviate this problem, we propose a method combining an SO(3)-equivariant convolutional implicit network and a positive-incentive point sampling (PIPS) strategy. The SO(3)-equivariant convolutional implicit network estimates point-level attributes with SO(3)-equivariance at arbitrary query locations, demonstrating superior performance compared to most existing baselines. The PIPS strategy dynamically determines sampling locations based on the input, thereby boosting the network's accuracy and training efficiency. Our method outperforms the state-of-the-art on three pose estimation datasets. Notably, it demonstrates significant improvements in challenging scenarios, such as objects captured with unseen pose, high occlusion, novel geometry, and severe noise.
SOCS: Semantically-aware Object Coordinate Space for Category-Level 6D Object Pose Estimation under Large Shape Variations
Mar 18, 2023



Most learning-based approaches to category-level 6D pose estimation are design around normalized object coordinate space (NOCS). While being successful, NOCS-based methods become inaccurate and less robust when handling objects of a category containing significant intra-category shape variations. This is because the object coordinates induced by global and rigid alignment of objects are semantically incoherent, making the coordinate regression hard to learn and generalize. We propose Semantically-aware Object Coordinate Space (SOCS) built by warping-and-aligning the objects guided by a sparse set of keypoints with semantically meaningful correspondence. SOCS is semantically coherent: Any point on the surface of a object can be mapped to a semantically meaningful location in SOCS, allowing for accurate pose and size estimation under large shape variations. To learn effective coordinate regression to SOCS, we propose a novel multi-scale coordinate-based attention network. Evaluations demonstrate that our method is easy to train, well-generalizing for large intra-category shape variations and robust to inter-object occlusions.
Lexicon-constrained Copying Network for Chinese Abstractive Summarization
Oct 16, 2020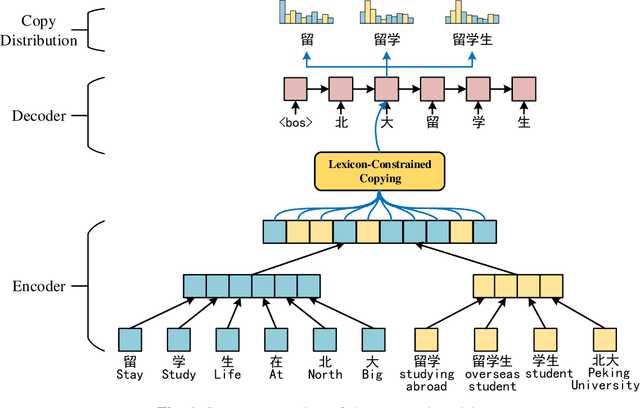
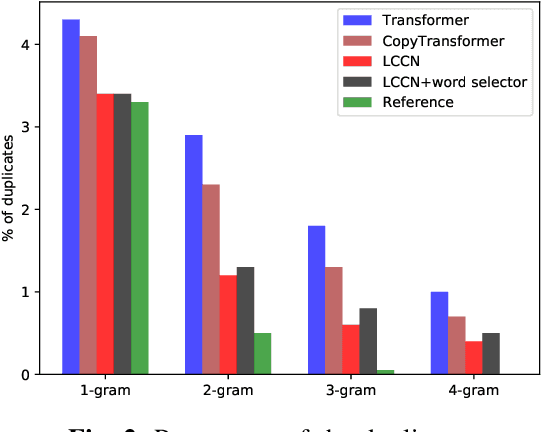
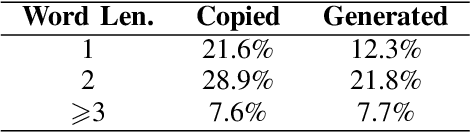
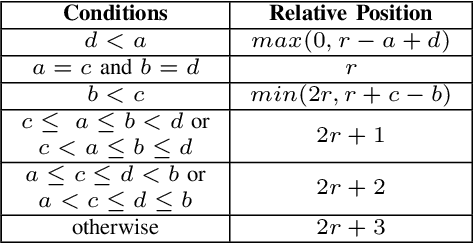
Copy mechanism allows sequence-to-sequence models to choose words from the input and put them directly into the output, which is finding increasing use in abstractive summarization. However, since there is no explicit delimiter in Chinese sentences, most existing models for Chinese abstractive summarization can only perform character copy, resulting in inefficient. To solve this problem, we propose a lexicon-constrained copying network that models multi-granularity in both encoder and decoder. On the source side, words and characters are aggregated into the same input memory using a Transformerbased encoder. On the target side, the decoder can copy either a character or a multi-character word at each time step, and the decoding process is guided by a word-enhanced search algorithm that facilitates the parallel computation and encourages the model to copy more words. Moreover, we adopt a word selector to integrate keyword information. Experiments results on a Chinese social media dataset show that our model can work standalone or with the word selector. Both forms can outperform previous character-based models and achieve competitive performances.