 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovering Novel LLM Experts via Task-Capability Coevolution
Apr 16, 2026Frontier model developers aim to train models continually to possess emergent, diverse capabilities. To extend capabilities, the current pre-training and post-training paradigm requires manually starting training runs with static datasets or reward functions every time. Addressing this limitation, our work pursues the insight that open-endedness (via the coevolution of models and tasks) can discover models with increasingly novel skills in a single run. We introduce a new model development framework that extends coevolution to large language model (LLM) discovery, open-ended \textit{Assessment Coevolving with Diverse Capabilities} (AC/DC). AC/DC evolves both LLMs via model merging and natural language tasks via synthetic data generation. AC/DC discovers growing archives of LLMs that surpass the capabilities of larger LLMs while taking up less GPU memory. In particular, our LLM populations achieve a broader Coverage of expertise than other curated models or baselines on downstream benchmarks, without \textit{any} explicit benchmark optimization. Furthermore, AC/DC improves Coverage over time, continually innovates on tasks and models, and improves performance in multi-agent best-of-N selection. Our findings highlight the potential of coevolution as a means of discovering broader sets of capabilities from base LLMs. Overall, AC/DC brings us one step closer to a profoundly new paradigm of LLM development, where continual improvements to the diversity of model capabilities can be accelerated by leveraging existing models as stepping stones to increasingly powerful models.
Decomposer: Semi-supervised Learning of Image Restoration and Image Decomposition
Nov 28, 2023



We present Decomposer, a semi-supervised reconstruction model that decomposes distorted image sequences into their fundamental building blocks - the original image and the applied augmentations, i.e., shadow, light, and occlusions. To solve this problem, we use the SIDAR dataset that provides a large number of distorted image sequences: each sequence contains images with shadows, lighting, and occlusions applied to an undistorted version. Each distortion changes the original signal in different ways, e.g., additive or multiplicative noise. We propose a transformer-based model to explicitly learn this decomposition. The sequential model uses 3D Swin-Transformers for spatio-temporal encoding and 3D U-Nets as prediction heads for individual parts of the decomposition. We demonstrate that by separately pre-training our model on weakly supervised pseudo labels, we can steer our model to optimize for our ambiguous problem definition and learn to differentiate between the different image distortions.
Arena-Rosnav 2.0: A Development and Benchmarking Platform for Robot Navigation in Highly Dynamic Environments
Feb 20, 2023Following up on our previous works, in this paper, we present Arena-Rosnav 2.0 an extension to our previous works Arena-Bench and Arena-Rosnav, which adds a variety of additional modules for developing and benchmarking robotic navigation approaches. The platform is fundamentally restructured and provides unified APIs to add additional functionalities such as planning algorithms, simulators, or evaluation functionalities. We have included more realistic simulation and pedestrian behavior and provide a profound documentation to lower the entry barrier. We evaluated our system by first, conducting a user study in which we asked experienced researchers as well as new practitioners and students to test our system. The feedback was mostly positive and a high number of participants are utilizing our system for other research endeavors. Finally, we demonstrate the feasibility of our system by integrating two new simulators and a variety of state of the art navigation approaches and benchmark them against one another. The platform is openly available at https://github.com/Arena-Rosnav.
Arena-Bench: A Benchmarking Suite for Obstacle Avoidance Approaches in Highly Dynamic Environments
Jun 12, 2022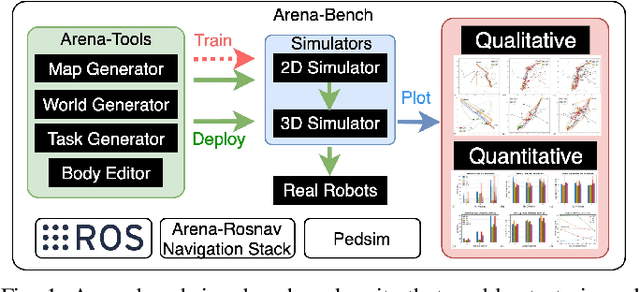
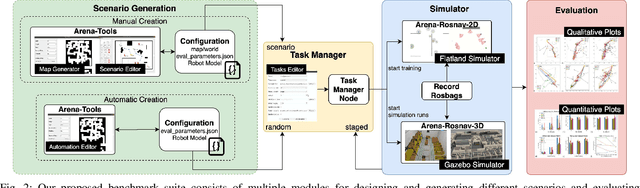
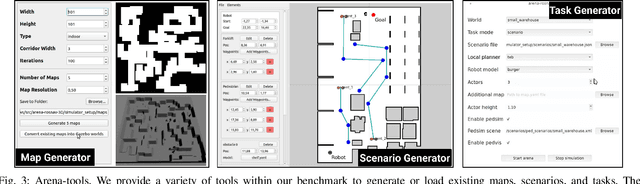
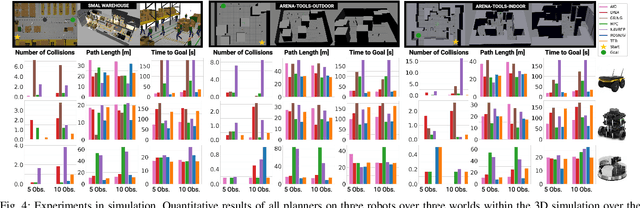
The ability to autonomously navigate safely, especially within dynamic environments, is paramount for mobile robotics. In recent years, DRL approaches have shown superior performance in dynamic obstacle avoidance. However, these learning-based approaches are often developed in specially designed simulation environments and are hard to test against conventional planning approaches. Furthermore, the integration and deployment of these approaches into real robotic platforms are not yet completely solved. In this paper, we present Arena-bench, a benchmark suite to train, test, and evaluate navigation planners on different robotic platforms within 3D environments. It provides tools to design and generate highly dynamic evaluation worlds, scenarios, and tasks for autonomous navigation and is fully integrated into the robot operating system. To demonstrate the functionalities of our suite, we trained a DRL agent on our platform and compared it against a variety of existing different model-based and learning-based navigation approaches on a variety of relevant metrics. Finally, we deployed the approaches towards real robots and demonstrated the reproducibility of the results. The code is publicly available at github.com/ignc-research/arena-bench.