 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Predictive Representations for Deformable Objects Using Contrastive Estimation
Mar 11, 2020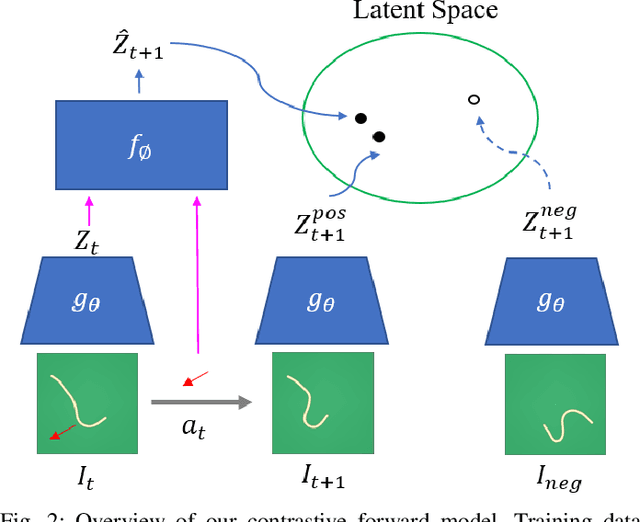
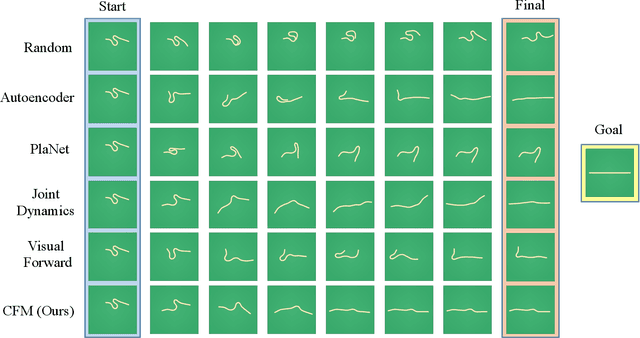
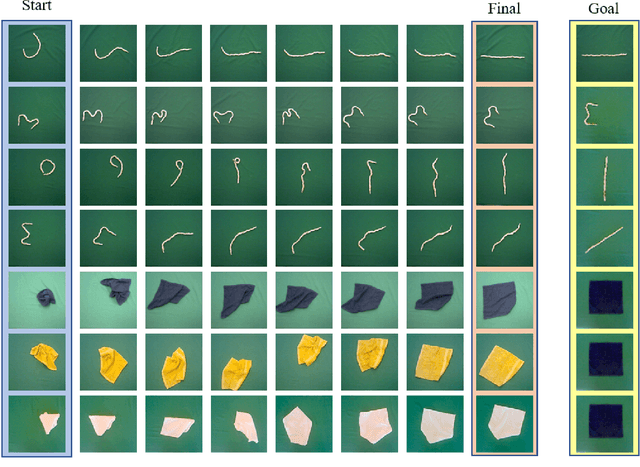
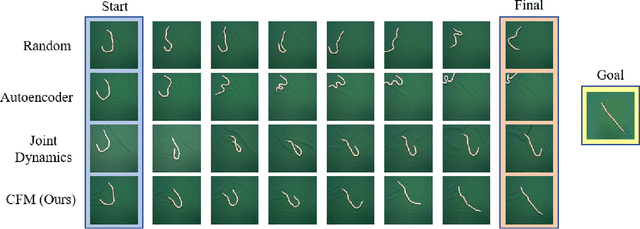
Using visual model-based learning for deformable object manipulation is challenging due to difficulties in learning plannable visual representations along with complex dynamic models. In this work, we propose a new learning framework that jointly optimizes both the visual representation model and the dynamics model using contrastive estimation. Using simulation data collected by randomly perturbing deformable objects on a table, we learn latent dynamics models for these objects in an offline fashion. Then, using the learned models, we use simple model-based planning to solve challenging deformable object manipulation tasks such as spreading ropes and cloths. Experimentally, we show substantial improvements in performance over standard model-based learning techniques across our rope and cloth manipulation suite. Finally, we transfer our visual manipulation policies trained on data purely collected in simulation to a real PR2 robot through domain randomization.