 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFacilitating Longitudinal Interaction Studies of AI Systems
Aug 14, 2025UIST researchers develop tools to address user challenges. However, user interactions with AI evolve over time through learning, adaptation, and repurposing, making one time evaluations insufficient. Capturing these dynamics requires longer-term studies, but challenges in deployment, evaluation design, and data collection have made such longitudinal research difficult to implement. Our workshop aims to tackle these challenges and prepare researchers with practical strategies for longitudinal studies. The workshop includes a keynote, panel discussions, and interactive breakout groups for discussion and hands-on protocol design and tool prototyping sessions. We seek to foster a community around longitudinal system research and promote it as a more embraced method for designing, building, and evaluating UIST tools.
Cybernetic Marionette: Channeling Collective Agency Through a Wearable Robot in a Live Dancer-Robot Duet
Jun 11, 2025We describe DANCE^2, an interactive dance performance in which audience members channel their collective agency into a dancer-robot duet by voting on the behavior of a wearable robot affixed to the dancer's body. At key moments during the performance, the audience is invited to either continue the choreography or override it, shaping the unfolding interaction through real-time collective input. While post-performance surveys revealed that participants felt their choices meaningfully influenced the performance, voting data across four public performances exhibited strikingly consistent patterns. This tension between what audience members do, what they feel, and what actually changes highlights a complex interplay between agentive behavior, the experience of agency, and power. We reflect on how choreography, interaction design, and the structure of the performance mediate this relationship, offering a live analogy for algorithmically curated digital systems where agency is felt, but not exercised.
SHAPE-IT: Exploring Text-to-Shape-Display for Generative Shape-Changing Behaviors with LLMs
Sep 10, 2024



This paper introduces text-to-shape-display, a novel approach to generating dynamic shape changes in pin-based shape displays through natural language commands. By leveraging large language models (LLMs) and AI-chaining, our approach allows users to author shape-changing behaviors on demand through text prompts without programming. We describe the foundational aspects necessary for such a system, including the identification of key generative elements (primitive, animation, and interaction) and design requirements to enhance user interaction, based on formative exploration and iterative design processes. Based on these insights, we develop SHAPE-IT, an LLM-based authoring tool for a 24 x 24 shape display, which translates the user's textual command into executable code and allows for quick exploration through a web-based control interface. We evaluate the effectiveness of SHAPE-IT in two ways: 1) performance evaluation and 2) user evaluation (N= 10). The study conclusions highlight the ability to facilitate rapid ideation of a wide range of shape-changing behaviors with AI. However, the findings also expose accuracy-related challenges and limitations, prompting further exploration into refining the framework for leveraging AI to better suit the unique requirements of shape-changing systems.
CARDinality: Interactive Card-shaped Robots with Locomotion and Haptics using Vibration
Sep 08, 2024



This paper introduces a novel approach to interactive robots by leveraging the form-factor of cards to create thin robots equipped with vibrational capabilities for locomotion and haptic feedback. The system is composed of flat-shaped robots with on-device sensing and wireless control, which offer lightweight portability and scalability. This research introduces a hardware prototype. Applications include augmented card playing, educational tools, and assistive technology, which showcase CARDinality's versatility in tangible interaction.
Calico: Relocatable On-cloth Wearables with Fast, Reliable, and Precise Locomotion
Aug 17, 2022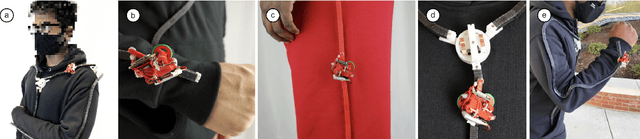
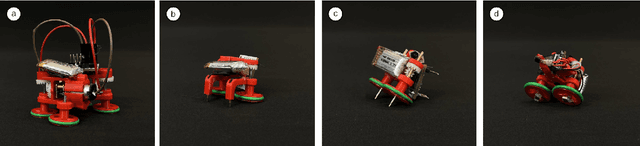
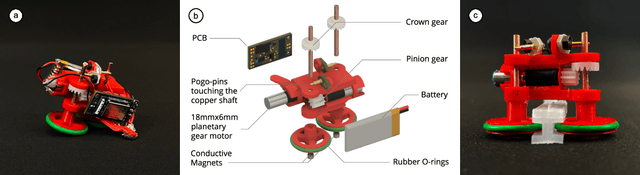
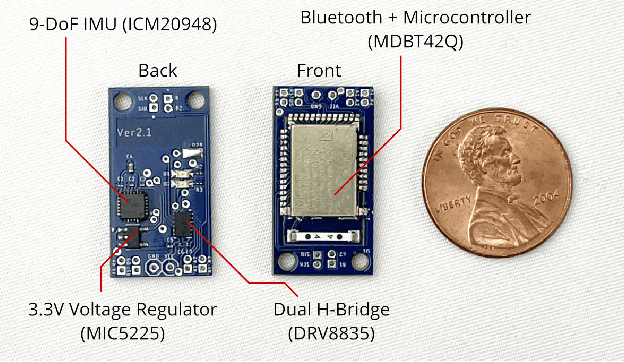
We explore Calico, a miniature relocatable wearable system with fast and precise locomotion for on-body interaction, actuation and sensing. Calico consists of a two-wheel robot and an on-cloth track mechanism or "railway," on which the robot travels. The robot is self-contained, small in size, and has additional sensor expansion options. The track system allows the robot to move along the user's body and reach any predetermined location. It also includes rotational switches to enable complex routing options when diverging tracks are presented. We report the design and implementation of Calico with a series of technical evaluations for system performance. We then present a few application scenarios, and user studies to understand the potential of Calico as a dance trainer and also explore the qualitative perception of our scenarios to inform future research in this space.