 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSignRAG: A Retrieval-Augmented System for Scalable Zero-Shot Road Sign Recognition
Dec 14, 2025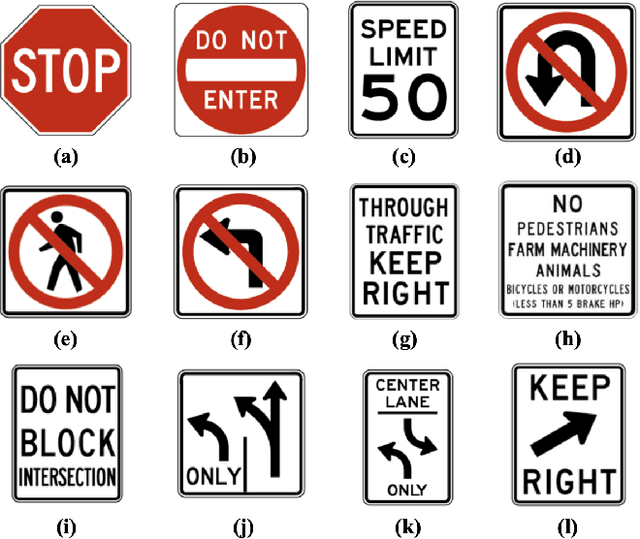

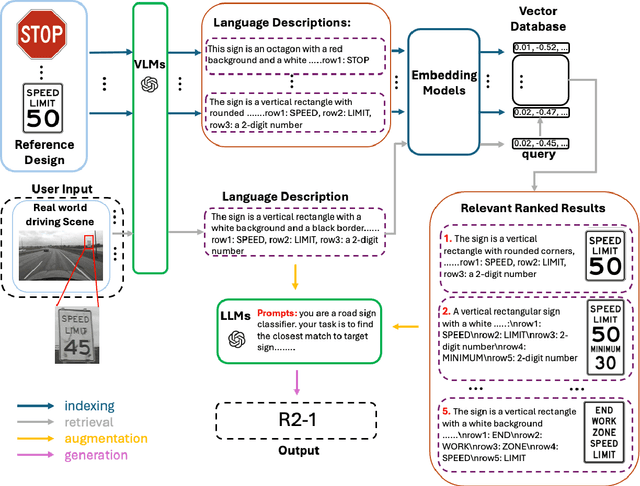

Automated road sign recognition is a critical task for intelligent transportation systems, but traditional deep learning methods struggle with the sheer number of sign classes and the impracticality of creating exhaustive labeled datasets. This paper introduces a novel zero-shot recognition framework that adapts the Retrieval-Augmented Generation (RAG) paradigm to address this challenge. Our method first uses a Vision Language Model (VLM) to generate a textual description of a sign from an input image. This description is used to retrieve a small set of the most relevant sign candidates from a vector database of reference designs. Subsequently, a Large Language Model (LLM) reasons over the retrieved candidates to make a final, fine-grained recognition. We validate this approach on a comprehensive set of 303 regulatory signs from the Ohio MUTCD. Experimental results demonstrate the framework's effectiveness, achieving 95.58% accuracy on ideal reference images and 82.45% on challenging real-world road data. This work demonstrates the viability of RAG-based architectures for creating scalable and accurate systems for road sign recognition without task-specific training.
Training Adversarial yet Safe Agent to Characterize Safety Performance of Highly Automated Vehicles
Feb 02, 2024This paper focuses on safety performance testing and characterization of black-box highly automated vehicles (HAV). Existing testing approaches typically obtain the testing outcomes by deploying the HAV into a specific testing environment. Such a testing environment can involve various passively given testing strategies presented by other traffic participants such as (i) the naturalistic driving policy learned from human drivers, (ii) extracted concrete scenarios from real-world driving data, and (iii) model-based or data-driven adversarial testing methodologies focusing on forcing safety-critical events. The safety performance of HAV is further characterized by analyzing the obtained testing outcomes with a particular selected measure, such as the observed collision risk. The aforementioned testing practices suffer from the scarcity of safety-critical events, have limited operational design domain (ODD) coverage, or are biased toward long-tail unsafe cases. This paper presents a novel and informative testing strategy that differs from these existing practices. The proposal is inspired by the intuition that a relatively safer HAV driving policy would allow the traffic vehicles to exhibit a higher level of aggressiveness to achieve a certain fixed level of an overall safe outcome. One can specifically characterize such a HAV and traffic interactive strategy and use it as a safety performance indicator for the HAV. Under the proposed testing scheme, the HAV is evaluated under its full ODD with a reward function that represents a trade-off between safety and adversity in generating safety-critical events. The proposed methodology is demonstrated in simulation with various HAV designs under different operational design domains.