 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSay the Mission, Execute the Swarm: Agent-Enhanced LLM Reasoning in the Web-of-Drones
May 05, 2026Large Language Models (LLMs) are increasingly explored as high-level reasoning engines for cyber-physical systems, yet their application to real-time UAV swarm management remains challenging due to heterogeneous interfaces, limited grounding, and the need for long-running closed-loop execution. This paper presents a mission-agnostic, agent-enhanced LLM framework for UAV swarm control, where users express mission objectives in natural language and the system autonomously executes them through grounded, real-time interactions. The proposed architecture combines an LLM-based Agent Core with a Model Context Protocol (MCP) gateway and a Web-of-Drones abstraction based on W3C Web of Things (WoT) standards. By exposing drones, sensors, and services as standardized WoT Things, the framework enables structured tool-based interaction, continuous state observation, and safe actuation without relying on code generation. We evaluate the framework using ArduPilot-based simulation across four swarm missions and six state-of-the-art LLMs. Results show that, despite strong reasoning abilities, current general-purpose LLMs still struggle to achieve reliable execution - even for simple swarm tasks - when operating without explicit grounding and execution support. Task-specific planning tools and runtime guardrails substantially improve robustness, while token consumption alone is not indicative of execution quality or reliability.
Relativistic Digital Twin: Bringing the IoT to the Future
Jan 18, 2023



Complex IoT ecosystems often require the usage of Digital Twins (DTs) of their physical assets in order to perform predictive analytics and simulate what-if scenarios. DTs are able to replicate IoT devices and adapt over time to their behavioral changes. However, DTs in IoT are typically tailored to a specific use case, without the possibility to seamlessly adapt to different scenarios. Further, the fragmentation of IoT poses additional challenges on how to deploy DTs in heterogeneous scenarios characterized by the usage of multiple data formats and IoT network protocols. In this paper, we propose the Relativistic Digital Twin (RDT) framework, through which we automatically generate general purpose DTs of IoT entities and tune their behavioral models over time by constantly observing their real counterparts. The framework relies on the object representation via the Web of Things (WoT), to offer a standardized interface to each of the IoT devices as well as to their DTs. To this purpose, we extended the W3C WoT standard in order to encompass the concept of behavioral model and define it in the Thing Description (TD) through a new vocabulary. Finally, we evaluated the RDT framework over two disjoint use cases to assess its correctness and learning performance, i.e. the DT of a simulated smart home scenario with the capability of forecasting the indoor temperature, and the DT of a real-world drone with the capability of forecasting its trajectory in an outdoor scenario.
Intelligent Drone Swarm for Search and Rescue Operations at Sea
Nov 13, 2018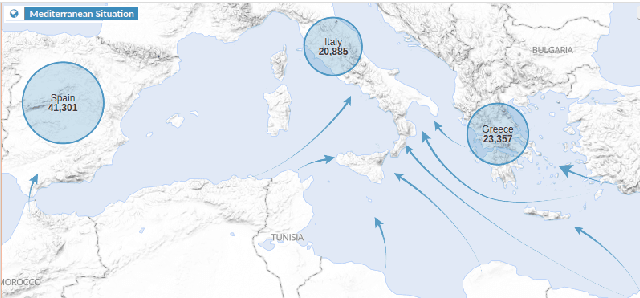
In recent years, a rising numbers of people arrived in the European Union, traveling across the Mediterranean Sea or overland through Southeast Europe in what has been later named as the European migrant crisis. In the last 5 years, more than 16 thousands people have lost their lives in the Mediterranean sea during the crossing. The United Nations Secretary General Strategy on New Technologies is supporting the use of Artificial Intelligence (AI) and Robotics to accelerate the achievement of the 2030 Sustainable Development Agenda, which includes safe and regular migration processes among the others. In the same spirit, the central idea of this project aims at using AI technology for Search And Rescue (SAR) operations at sea. In particular, we propose an autonomous fleet of self-organizing intelligent drones that would enable the coverage of a broader area, speeding-up the search processes and finally increasing the efficiency and effectiveness of migrants rescue operations.