 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural-guided, Bidirectional Program Search for Abstraction and Reasoning
Oct 26, 2021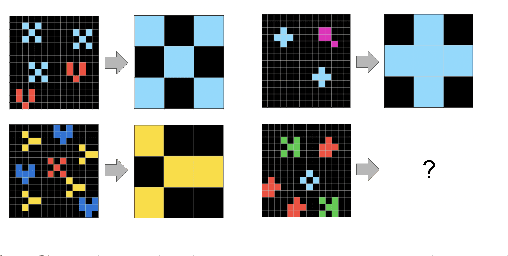
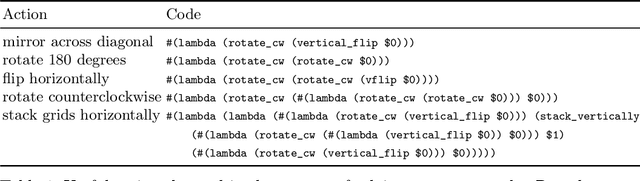
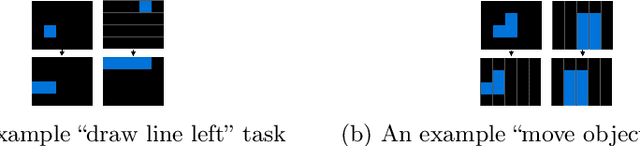

One of the challenges facing artificial intelligence research today is designing systems capable of utilizing systematic reasoning to generalize to new tasks. The Abstraction and Reasoning Corpus (ARC) measures such a capability through a set of visual reasoning tasks. In this paper we report incremental progress on ARC and lay the foundations for two approaches to abstraction and reasoning not based in brute-force search. We first apply an existing program synthesis system called DreamCoder to create symbolic abstractions out of tasks solved so far, and show how it enables solving of progressively more challenging ARC tasks. Second, we design a reasoning algorithm motivated by the way humans approach ARC. Our algorithm constructs a search graph and reasons over this graph structure to discover task solutions. More specifically, we extend existing execution-guided program synthesis approaches with deductive reasoning based on function inverse semantics to enable a neural-guided bidirectional search algorithm. We demonstrate the effectiveness of the algorithm on three domains: ARC, 24-Game tasks, and a 'double-and-add' arithmetic puzzle.
Distribution of Classification Margins: Are All Data Equal?
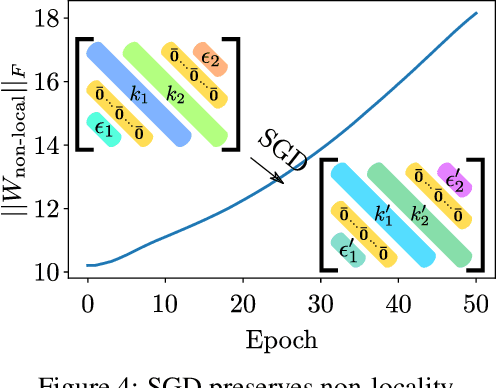
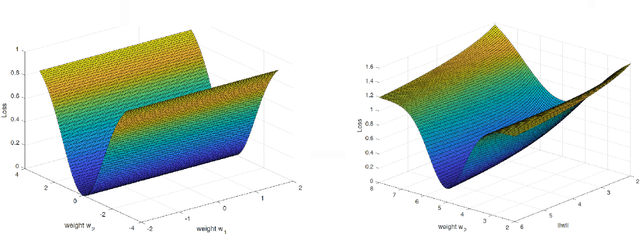
Jul 21, 2021Recent theoretical results show that gradient descent on deep neural networks under exponential loss functions locally maximizes classification margin, which is equivalent to minimizing the norm of the weight matrices under margin constraints. This property of the solution however does not fully characterize the generalization performance. We motivate theoretically and show empirically that the area under the curve of the margin distribution on the training set is in fact a good measure of generalization. We then show that, after data separation is achieved, it is possible to dynamically reduce the training set by more than 99% without significant loss of performance. Interestingly, the resulting subset of "high capacity" features is not consistent across different training runs, which is consistent with the theoretical claim that all training points should converge to the same asymptotic margin under SGD and in the presence of both batch normalization and weight decay.
Biologically Inspired Mechanisms for Adversarial Robustness
Jun 29, 2020

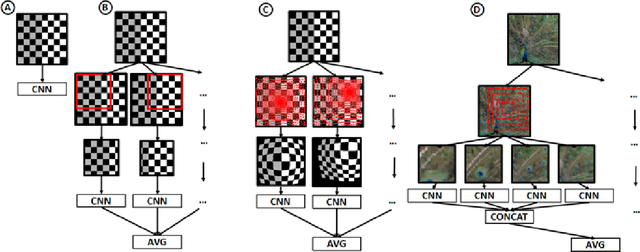
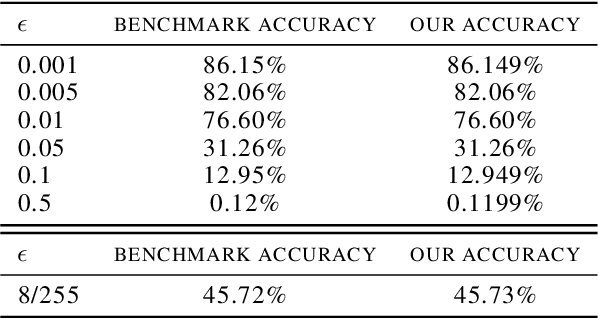
A convolutional neural network strongly robust to adversarial perturbations at reasonable computational and performance cost has not yet been demonstrated. The primate visual ventral stream seems to be robust to small perturbations in visual stimuli but the underlying mechanisms that give rise to this robust perception are not understood. In this work, we investigate the role of two biologically plausible mechanisms in adversarial robustness. We demonstrate that the non-uniform sampling performed by the primate retina and the presence of multiple receptive fields with a range of receptive field sizes at each eccentricity improve the robustness of neural networks to small adversarial perturbations. We verify that these two mechanisms do not suffer from gradient obfuscation and study their contribution to adversarial robustness through ablation studies.
Hierarchically Local Tasks and Deep Convolutional Networks
Jun 29, 2020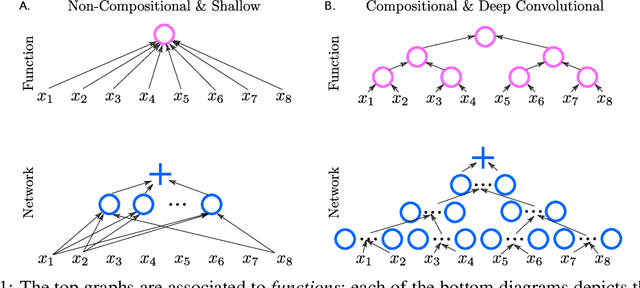
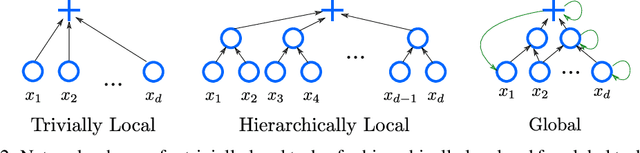
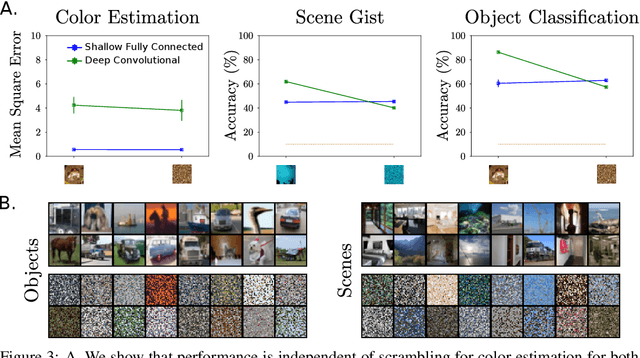
The main success stories of deep learning, starting with ImageNet, depend on convolutional networks, which on certain tasks perform significantly better than traditional shallow classifiers, such as support vector machines. Is there something special about deep convolutional networks that other learning machines do not possess? Recent results in approximation theory have shown that there is an exponential advantage of deep convolutional-like networks in approximating functions with hierarchical locality in their compositional structure. These mathematical results, however, do not say which tasks are expected to have input-output functions with hierarchical locality. Among all the possible hierarchically local tasks in vision, text and speech we explore a few of them experimentally by studying how they are affected by disrupting locality in the input images. We also discuss a taxonomy of tasks ranging from local, to hierarchically local, to global and make predictions about the type of networks required to perform efficiently on these different types of tasks.
Double descent in the condition number
Dec 12, 2019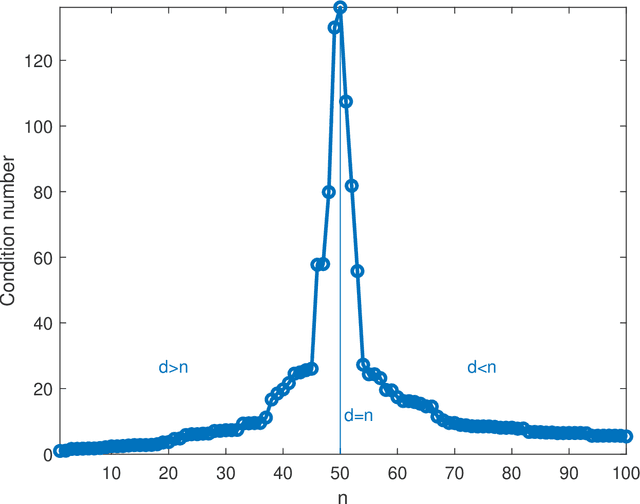
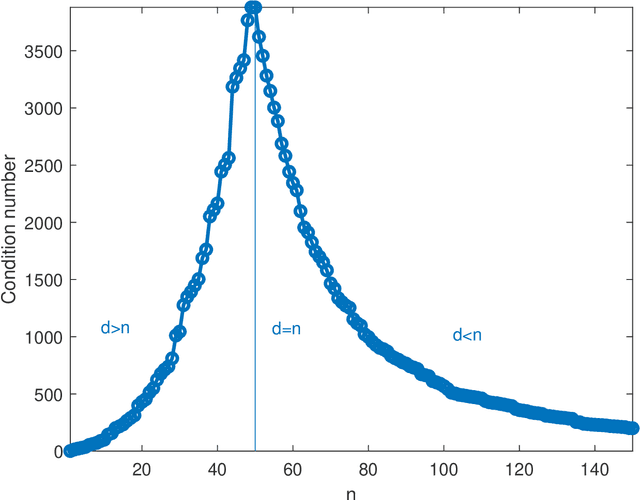
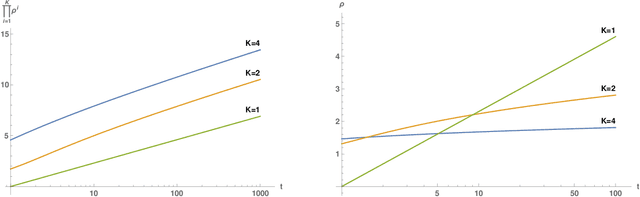
In solving a system of $n$ linear equations in $d$ variables $Ax=b$, the condition number of the $n,d$ matrix $A$ measures how much errors in the data $b$ affect the solution $x$. Bounds of this type are important in many inverse problems. An example is machine learning where the key task is to estimate an underlying function from a set of measurements at random points in a high dimensional space and where low sensitivity to error in the data is a requirement for good predictive performance. Here we discuss the simple observation, which is well-known but surprisingly little quoted that when the columns of $A$ are random vectors, the condition number of $A$ is highest if $d=n$, that is when the inverse of $A$ exists. An overdetermined system ($n>d$) as well as an underdetermined system ($n<d$), for which the pseudoinverse must be used instead of the inverse, typically have significantly better, that is lower, condition numbers. Thus the condition number of $A$ plotted as function of $d$ shows a double descent behavior with a peak at $d=n$.
Theoretical Issues in Deep Networks: Approximation, Optimization and Generalization
Aug 25, 2019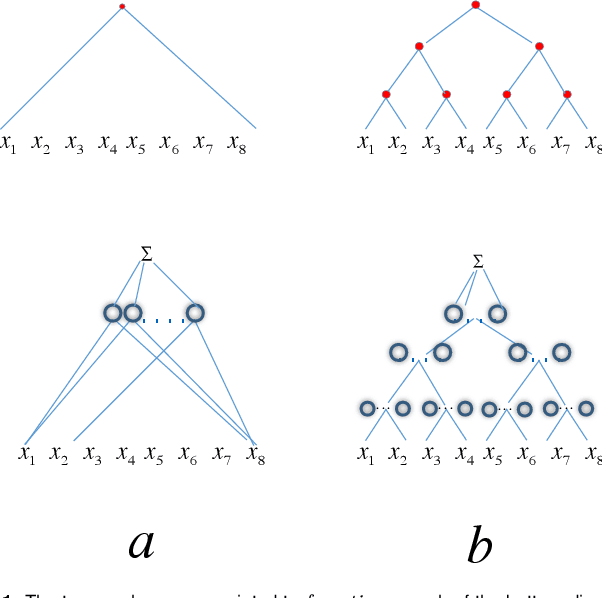
While deep learning is successful in a number of applications, it is not yet well understood theoretically. A satisfactory theoretical characterization of deep learning however, is beginning to emerge. It covers the following questions: 1) representation power of deep networks 2) optimization of the empirical risk 3) generalization properties of gradient descent techniques --- why the expected error does not suffer, despite the absence of explicit regularization, when the networks are overparametrized? In this review we discuss recent advances in the three areas. In approximation theory both shallow and deep networks have been shown to approximate any continuous functions on a bounded domain at the expense of an exponential number of parameters (exponential in the dimensionality of the function). However, for a subset of compositional functions, deep networks of the convolutional type can have a linear dependence on dimensionality, unlike shallow networks. In optimization we discuss the loss landscape for the exponential loss function and show that stochastic gradient descent will find with high probability the global minima. To address the question of generalization for classification tasks, we use classical uniform convergence results to justify minimizing a surrogate exponential-type loss function under a unit norm constraint on the weight matrix at each layer -- since the interesting variables for classification are the weight directions rather than the weights. Our approach, which is supported by several independent new results, offers a solution to the puzzle about generalization performance of deep overparametrized ReLU networks, uncovering the origin of the underlying hidden complexity control.
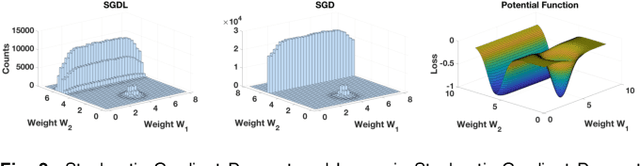
Theory III: Dynamics and Generalization in Deep Networks - a simple solution
Apr 11, 2019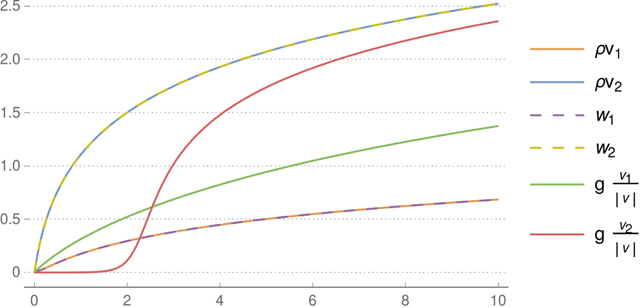
We review recent observations on the dynamical systems induced by gradient descent (GD) methods used for training deep networks and summarize properties of the solutions they converge to. Recent results illuminate the absence of overfitting in the special case of linear networks for binary classification. They prove that minimization of loss functions such as the logistic, the cross-entropy and the exponential loss yields asymptotic convergence to the maximum margin solution for linearly separable datasets, independently of the initial conditions. Here we discuss the case of nonlinear DNNs near zero minima of the empirical loss, under exponential-type and square losses, for several variations of the basic GD algorithm, including a new NMGD version that converges to the minimum norm fixed points. Our main results are: 1) GD algorithms with weight normalization constraint achieve generalization; 2) the fundamental reason for the effectiveness of existing weight and batch normalization techniques is that they are approximate implementations of maximizing the margin under unit norm constraint; 3) even without explicit unit norm constraints, generalization can still be obtained for not-too-deep networks because standard GD is intrinsically consistent with the dynamics of normalized weights. In addition, the balance of the weights across different layers, if present at initialization, is maintained by the gradient flow. In the perspective of these theoretical results, we discuss experimental evidence around the apparent absence of overfitting, that is the observation that the expected classification error does not get worse when increasing the number of parameters. Our explanation focuses on the implicit normalization enforced by algorithms such as batch normalization. In particular, the control of the norm of the weights is related to Halpern iterations for minimum norm solutions.
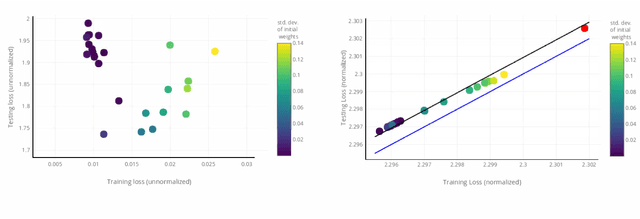
A Surprising Linear Relationship Predicts Test Performance in Deep Networks
Jul 25, 2018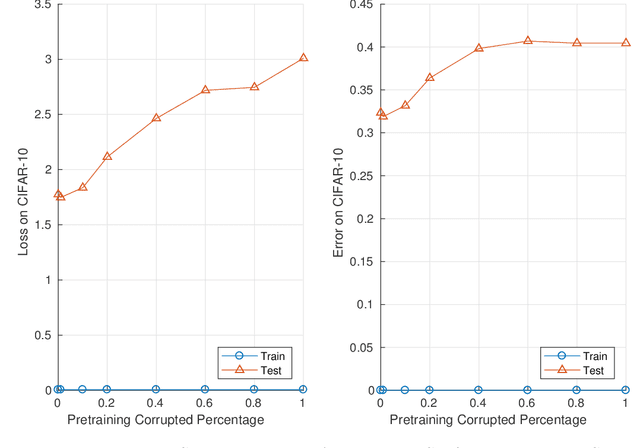
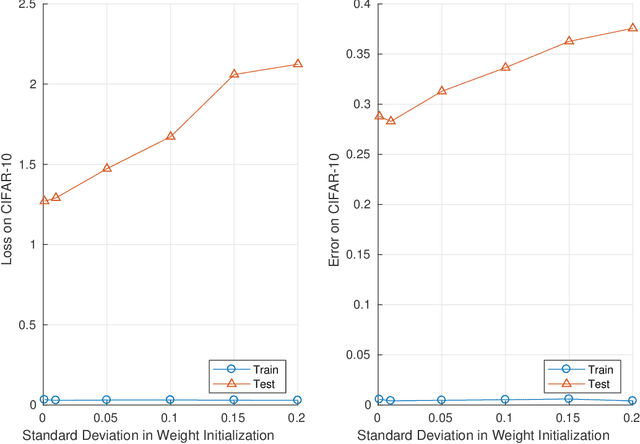
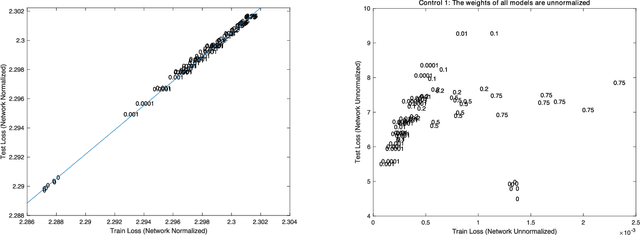

Given two networks with the same training loss on a dataset, when would they have drastically different test losses and errors? Better understanding of this question of generalization may improve practical applications of deep networks. In this paper we show that with cross-entropy loss it is surprisingly simple to induce significantly different generalization performances for two networks that have the same architecture, the same meta parameters and the same training error: one can either pretrain the networks with different levels of "corrupted" data or simply initialize the networks with weights of different Gaussian standard deviations. A corollary of recent theoretical results on overfitting shows that these effects are due to an intrinsic problem of measuring test performance with a cross-entropy/exponential-type loss, which can be decomposed into two components both minimized by SGD -- one of which is not related to expected classification performance. However, if we factor out this component of the loss, a linear relationship emerges between training and test losses. Under this transformation, classical generalization bounds are surprisingly tight: the empirical/training loss is very close to the expected/test loss. Furthermore, the empirical relation between classification error and normalized cross-entropy loss seem to be approximately monotonic
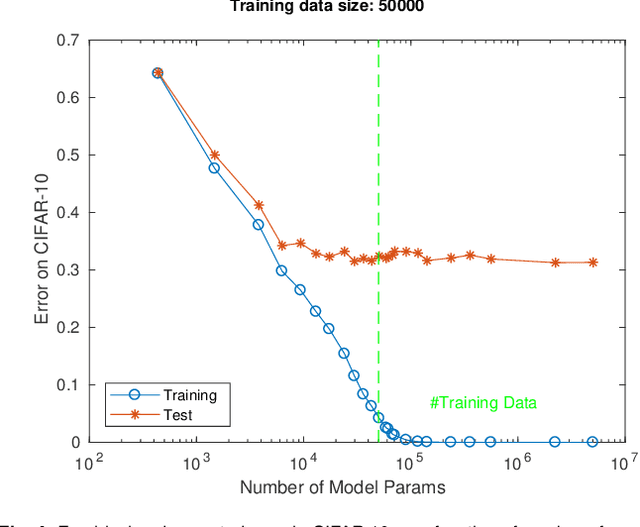
Theory IIIb: Generalization in Deep Networks
Jun 29, 2018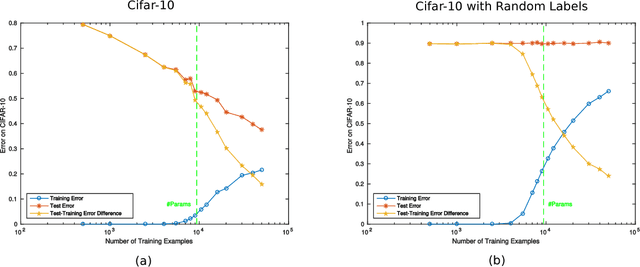
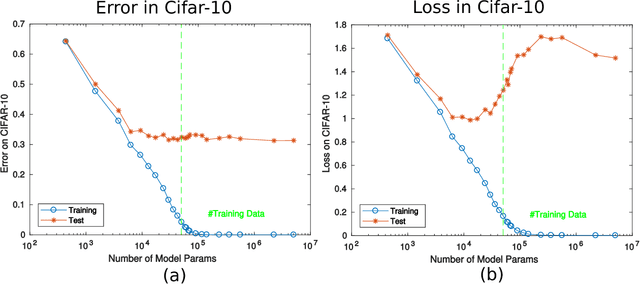

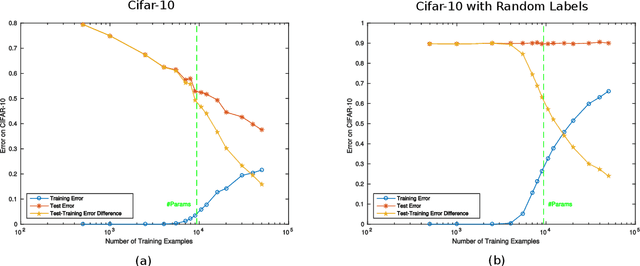
A main puzzle of deep neural networks (DNNs) revolves around the apparent absence of "overfitting", defined in this paper as follows: the expected error does not get worse when increasing the number of neurons or of iterations of gradient descent. This is surprising because of the large capacity demonstrated by DNNs to fit randomly labeled data and the absence of explicit regularization. Recent results by Srebro et al. provide a satisfying solution of the puzzle for linear networks used in binary classification. They prove that minimization of loss functions such as the logistic, the cross-entropy and the exp-loss yields asymptotic, "slow" convergence to the maximum margin solution for linearly separable datasets, independently of the initial conditions. Here we prove a similar result for nonlinear multilayer DNNs near zero minima of the empirical loss. The result holds for exponential-type losses but not for the square loss. In particular, we prove that the weight matrix at each layer of a deep network converges to a minimum norm solution up to a scale factor (in the separable case). Our analysis of the dynamical system corresponding to gradient descent of a multilayer network suggests a simple criterion for ranking the generalization performance of different zero minimizers of the empirical loss.