 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Scalability-Aware Allocation of Swarm Robots: From Linear to Retrograde Performance via Marginal Gains
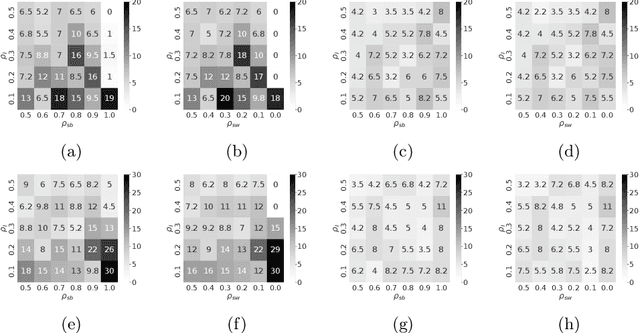
Dec 29, 2025In collective systems, the available agents are a limited resource that must be allocated among tasks to maximize collective performance. Computing the optimal allocation of several agents to numerous tasks through a brute-force approach can be infeasible, especially when each task's performance scales differently with the increase of agents. For example, difficult tasks may require more agents to achieve similar performances compared to simpler tasks, but performance may saturate nonlinearly as the number of allocated agents increases. We propose a computationally efficient algorithm, based on marginal performance gains, for optimally allocating agents to tasks with concave scalability functions, including linear, saturating, and retrograde scaling, to achieve maximum collective performance. We test the algorithm by allocating a simulated robot swarm among collective decision-making tasks, where embodied agents sample their environment and exchange information to reach a consensus on spatially distributed environmental features. We vary task difficulties by different geometrical arrangements of environmental features in space (patchiness). In this scenario, decision performance in each task scales either as a saturating curve (following the Condorcet's Jury Theorem in an interference-free setup) or as a retrograde curve (when physical interference among robots restricts their movement). Using simple robot simulations, we show that our algorithm can be useful in allocating robots among tasks. Our approach aims to advance the deployment of future real-world multi-robot systems.
Swarm Oracle: Trustless Blockchain Agreements through Robot Swarms
Sep 19, 2025
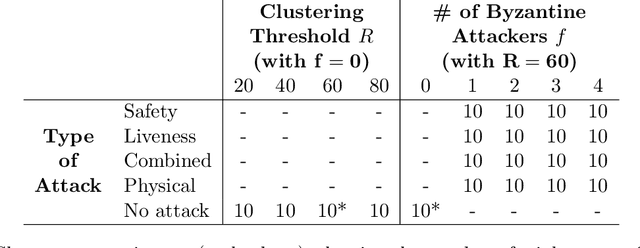


Blockchain consensus, rooted in the principle ``don't trust, verify'', limits access to real-world data, which may be ambiguous or inaccessible to some participants. Oracles address this limitation by supplying data to blockchains, but existing solutions may reduce autonomy, transparency, or reintroduce the need for trust. We propose Swarm Oracle: a decentralized network of autonomous robots -- that is, a robot swarm -- that use onboard sensors and peer-to-peer communication to collectively verify real-world data and provide it to smart contracts on public blockchains. Swarm Oracle leverages the built-in decentralization, fault tolerance and mobility of robot swarms, which can flexibly adapt to meet information requests on-demand, even in remote locations. Unlike typical cooperative robot swarms, Swarm Oracle integrates robots from multiple stakeholders, protecting the system from single-party biases but also introducing potential adversarial behavior. To ensure the secure, trustless and global consensus required by blockchains, we employ a Byzantine fault-tolerant protocol that enables robots from different stakeholders to operate together, reaching social agreements of higher quality than the estimates of individual robots. Through extensive experiments using both real and simulated robots, we showcase how consensus on uncertain environmental information can be achieved, despite several types of attacks orchestrated by large proportions of the robots, and how a reputation system based on blockchain tokens lets Swarm Oracle autonomously recover from faults and attacks, a requirement for long-term operation.
Bio-inspired decision making in swarms under biases from stubborn robots, corrupted communication, and independent discovery
Sep 09, 2025



Minimalistic robot swarms offer a scalable, robust, and cost-effective approach to performing complex tasks with the potential to transform applications in healthcare, disaster response, and environmental monitoring. However, coordinating such decentralised systems remains a fundamental challenge, particularly when robots are constrained in communication, computation, and memory. In our study, individual robots frequently make errors when sensing the environment, yet the swarm can rapidly and reliably reach consensus on the best among $n$ discrete options. We compare two canonical mechanisms of opinion dynamics -- direct-switch and cross-inhibition -- which are simple yet effective rules for collective information processing observed in biological systems across scales, from neural populations to insect colonies. We generalise the existing mean-field models by considering asocial biases influencing the opinion dynamics. While swarms using direct-switch reliably select the best option in absence of asocial dynamics, their performance deteriorates once such biases are introduced, often resulting in decision deadlocks. In contrast, bio-inspired cross-inhibition enables faster, more cohesive, accurate, robust, and scalable decisions across a wide range of biased conditions. Our findings provide theoretical and practical insights into the coordination of minimal swarms and offer insights that extend to a broad class of decentralised decision-making systems in biology and engineering.
Securing Federated Learning in Robot Swarms using Blockchain Technology
Sep 03, 2024Federated learning is a new approach to distributed machine learning that offers potential advantages such as reducing communication requirements and distributing the costs of training algorithms. Therefore, it could hold great promise in swarm robotics applications. However, federated learning usually requires a centralized server for the aggregation of the models. In this paper, we present a proof-of-concept implementation of federated learning in a robot swarm that does not compromise decentralization. To do so, we use blockchain technology to enable our robot swarm to securely synchronize a shared model that is the aggregation of the individual models without relying on a central server. We then show that introducing a single malfunctioning robot can, however, heavily disrupt the training process. To prevent such situations, we devise protection mechanisms that are implemented through secure and tamper-proof blockchain smart contracts. Our experiments are conducted in ARGoS, a physics-based simulator for swarm robotics, using the Ethereum blockchain protocol which is executed by each simulated robot.
Toychain: A Simple Blockchain for Research in Swarm Robotics
Jul 09, 2024This technical report describes the implementation of Toychain: a simple, lightweight blockchain implemented in Python, designed for ease of deployment and practicality in robotics research. It can be integrated with various software and simulation tools used in robotics (we have integrated it with ARGoS, Gazebo, and ROS2), and also be deployed on real robots capable of Wi-Fi communications. The Toychain package supports the deployment of smart contracts written in Python (computer programs that can be executed by and synchronized across a distributed network). The nodes in the blockchain can execute smart contract functions by broadcasting transactions, which update the state of the blockchain upon agreement by all other nodes. The conditions for this agreement are established by a consensus protocol. The Toychain package allows for custom implementations of the consensus protocol, which can be useful for research or meeting specific application requirements. Currently, Proof-of-Work and Proof-of-Authority are implemented.
Studying speed-accuracy trade-offs in best-of-n collective decision-making through heterogeneous mean-field modelling
Oct 20, 2023



To succeed in their objectives, groups of individuals must be able to make quick and accurate collective decisions on the best among alternatives with different qualities. Group-living animals aim to do that all the time. Plants and fungi are thought to do so too. Swarms of autonomous robots can also be programmed to make best-of-n decisions for solving tasks collaboratively. Ultimately, humans critically need it and so many times they should be better at it! Despite their simplicity, mathematical tractability made models like the voter model (VM) and the local majority rule model (MR) useful to describe in simple terms such collective decision-making processes. To reach a consensus, individuals change their opinion by interacting with neighbours in their social network. At least among animals and robots, options with a better quality are exchanged more often and therefore spread faster than lower-quality options, leading to the collective selection of the best option. With our work, we study the impact of individuals making errors in pooling others' opinions caused, for example, to reduce the cognitive load. Our analysis in grounded on the introduction of a model that generalises the two existing VM and MR models, showing a speed-accuracy trade-off regulated by the cognitive effort of individuals. We also investigate the impact of the interaction network topology on the collective dynamics. To do so, we extend our model and, by using the heterogeneous mean-field approach, we show that another speed-accuracy trade-off is regulated by network connectivity. An interesting result is that reduced network connectivity corresponds to an increase in collective decision accuracy
Do We Run Large-scale Multi-Robot Systems on the Edge? More Evidence for Two-Phase Performance in System Size Scaling
Oct 18, 2023With increasing numbers of mobile robots arriving in real-world applications, more robots coexist in the same space, interact, and possibly collaborate. Methods to provide such systems with system size scalability are known, for example, from swarm robotics. Example strategies are self-organizing behavior, a strict decentralized approach, and limiting the robot-robot communication. Despite applying such strategies, any multi-robot system breaks above a certain critical system size (i.e., number of robots) as too many robots share a resource (e.g., space, communication channel). We provide additional evidence based on simulations, that at these critical system sizes, the system performance separates into two phases: nearly optimal and minimal performance. We speculate that in real-world applications that are configured for optimal system size, the supposedly high-performing system may actually live on borrowed time as it is on a transient to breakdown. We provide two modeling options (based on queueing theory and a population model) that may help to support this reasoning.
Decentralised construction of a global coordinate system in a large swarm of minimalistic robots
Feb 28, 2023Collective intelligence and autonomy of robot swarms can be improved by enabling the individual robots to become aware they are the constituent units of a larger whole and what is their role. In this study, we present an algorithm to enable positional self-awareness in a swarm of minimalistic error-prone robots which can only locally broadcast messages and estimate the distance from their neighbours. Despite being unable to measure the bearing of incoming messages, the robots running our algorithm can calculate their position within a swarm deployed in a regular formation. We show through experiments with up to 200 Kilobot robots that such positional self-awareness can be employed by the robots to create a shared coordinate system and dynamically self-assign location-dependent tasks. Our solution has fewer requirements than state-of-the-art algorithms and contains collective noise-filtering mechanisms. Therefore, it has an extended range of robotic platforms on which it can run. All robots are interchangeable, run the same code, and do not need any prior knowledge. Through our algorithm, robots reach collective synchronisation, and can autonomously become self-aware of the swarm's spatial configuration and their position within it.
Controlling Robot Swarm Aggregation through a Minority of Informed Robots
May 06, 2022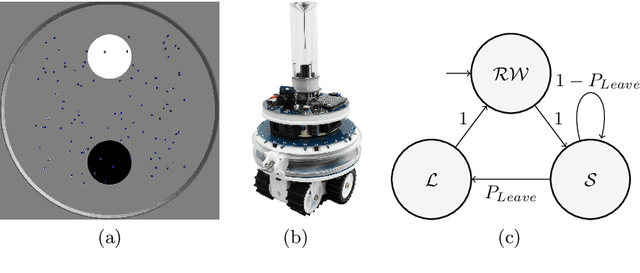
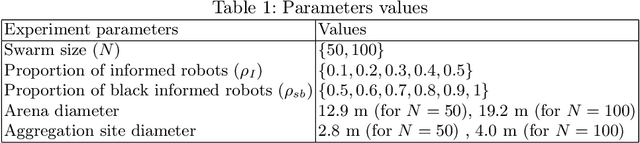
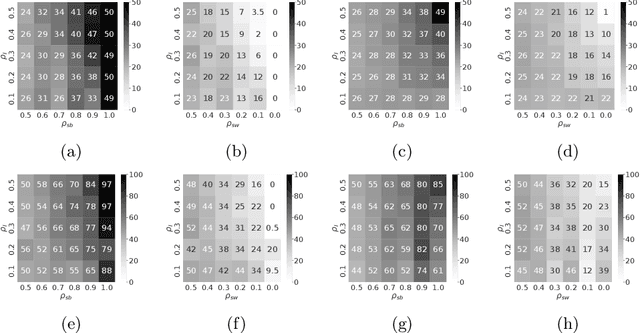
Self-organised aggregation is a well studied behaviour in swarm robotics as it is the pre-condition for the development of more advanced group-level responses. In this paper, we investigate the design of decentralised algorithms for a swarm of heterogeneous robots that self-aggregate over distinct target sites. A previous study has shown that including as part of the swarm a number of informed robots can steer the dynamic of the aggregation process to a desirable distribution of the swarm between the available aggregation sites. We have replicated the results of the previous study using a simplified approach, we removed constraints related to the communication protocol of the robots and simplified the control mechanisms regulating the transitions between states of the probabilistic controller. The results show that the performances obtained with the previous, more complex, controller can be replicated with our simplified approach which offers clear advantages in terms of portability to the physical robots and in terms of flexibility. That is, our simplified approach can generate self-organised aggregation responses in a larger set of operating conditions than what can be achieved with the complex controller.
Scalability in Computing and Robotics
Jun 08, 2020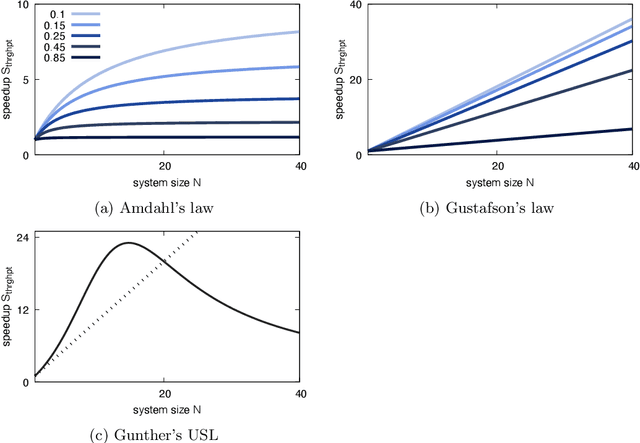
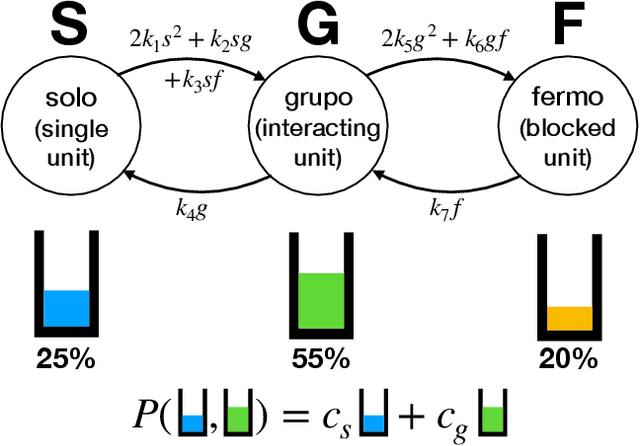
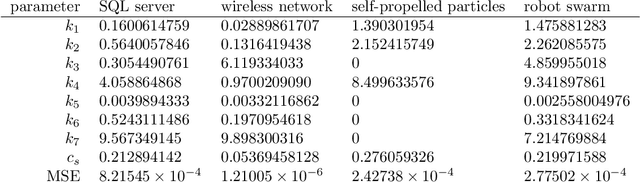
Efficient engineered systems require scalability. A scalable system has increasing performance with increasing system size. In an ideal case, the increase in performance (e.g., speedup) corresponds to the number of units that are added to the system. However, if multiple units work on the same task, then coordination among these units is required. This coordination can introduce overheads with an impact on system performance. The coordination costs can lead to sublinear improvement or even diminishing performance with increasing system size. However, there are also systems that implement efficient coordination and exploit collaboration of units to attain superlinear improvement. Modeling the scalability dynamics is key to understanding efficient systems. Known laws of scalability, such as Amdahl's law, Gustafson's law, and Gunther's Universal Scalability Law, are minimalistic phenomenological models that explain a rich variety of system behaviors through concise equations. While useful to gain general insights, the phenomenological nature of these models may limit the understanding of the underlying dynamics, as they are detached from first principles that could explain coordination overheads among units. Through a decentralized system approach, we propose a general model based on generic interactions between units that is able to describe, as specific cases, any general pattern of scalability included by previously reported laws. The proposed general model of scalability is built on first principles, or at least on a microscopic description of interaction between units, and therefore has the potential to contribute to a better understanding of system behavior and scalability. We show that this model can be applied to a diverse set of systems, such as parallel supercomputers, robot swarms, or wireless sensor networks, creating a unified view on interdisciplinary design for scalability.