 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTerrain characterisation for online adaptability of automated sonar processing: Lessons learnt from operationally applying ATR to sidescan sonar in MCM applications
Apr 29, 2024



The performance of Automated Recognition (ATR) algorithms on side-scan sonar imagery has shown to degrade rapidly when deployed on non benign environments. Complex seafloors and acoustic artefacts constitute distractors in the form of strong textural patterns, creating false detections or preventing detections of true objects. This paper presents two online seafloor characterisation techniques to improve explainability during Autonomous Underwater Vehicles (AUVs) missions. Importantly and as opposed to previous work in the domain, these techniques are not based on a model and require limited input from human operators, making it suitable for real-time onboard processing. Both techniques rely on an unsupervised machine learning approach to extract terrain features which relate to the human understanding of terrain complexity. The first technnique provides a quantitative, application-driven terrain characterisation metric based on the performance of an ATR algorithm. The second method provides a way to incorporate subject matter expertise and enables contextualisation and explainability in support for scenario-dependent subjective terrain characterisation. The terrain complexity matches the expectation of seasoned users making this tool desirable and trustworthy in comparison to traditional unsupervised approaches. We finally detail an application of these techniques to repair a Mine Countermeasures (MCM) mission carried with SeeByte autonomy framework Neptune.
Current Trends and Advances in Quantum Navigation for Maritime Applications: A Comprehensive Review
Oct 07, 2023This paper presents a comprehensive review of the current state of the art in quantum navigation systems, with a specific focus on their application in maritime navigation. Quantum technologies have the potential to revolutionise navigation and positioning systems due to their ability to provide highly accurate and secure information. The review covers the principles of quantum navigation and highlights the latest developments in quantum-enhanced sensors, atomic clocks, and quantum communication protocols. The paper also discusses the challenges and opportunities of using quantum technologies in maritime navigation, including the effects that the maritime environment and the specificity of marine applications can have on the performance of quantum sensors. Finally, the paper concludes with a discussion on the future of quantum navigation systems and their potential impact on the maritime industry. This review aims at providing a valuable resource for researchers and engineers interested in the development and deployment of quantum navigation systems.
A Surrogate Model Framework for Explainable Autonomous Behaviour
May 31, 2023



Adoption and deployment of robotic and autonomous systems in industry are currently hindered by the lack of transparency, required for safety and accountability. Methods for providing explanations are needed that are agnostic to the underlying autonomous system and easily updated. Furthermore, different stakeholders with varying levels of expertise, will require different levels of information. In this work, we use surrogate models to provide transparency as to the underlying policies for behaviour activation. We show that these surrogate models can effectively break down autonomous agents' behaviour into explainable components for use in natural language explanations.
Towards Explaining Autonomy with Verbalised Decision Tree States
Sep 28, 2022
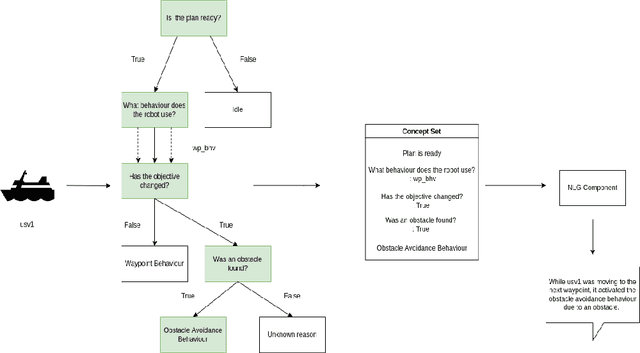
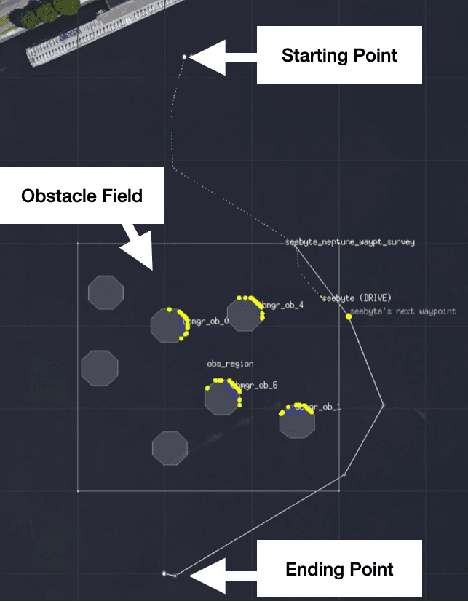
The development of new AUV technology increased the range of tasks that AUVs can tackle and the length of their operations. As a result, AUVs are capable of handling highly complex operations. However, these missions do not fit easily into the traditional method of defining a mission as a series of pre-planned waypoints because it is not possible to know, in advance, everything that might occur during the mission. This results in a gap between the operator's expectations and actual operational performance. Consequently, this can create a diminished level of trust between the operators and AUVs, resulting in unnecessary mission interruptions. To bridge this gap between in-mission robotic behaviours and operators' expectations, this work aims to provide a framework to explain decisions and actions taken by an autonomous vehicle during the mission, in an easy-to-understand manner. Additionally, the objective is to have an autonomy-agnostic system that can be added as an additional layer on top of any autonomy architecture. To make the approach applicable across different autonomous systems equipped with different autonomies, this work decouples the inner workings of the autonomy from the decision points and the resulting executed actions applying Knowledge Distillation. Finally, to present the explanations to the operators in a more natural way, the output of the distilled decision tree is combined with natural language explanations and reported to the operators as sentences. For this reason, an additional step known as Concept2Text Generation is added at the end of the explanation pipeline.
Improving the Modularity of AUV Control Systems using Behaviour Trees
Nov 01, 2018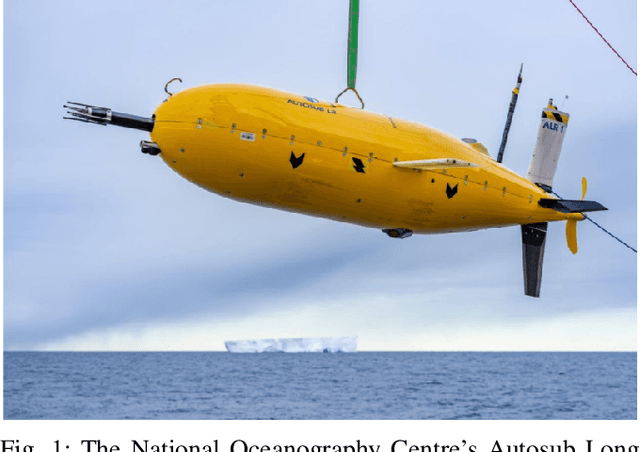
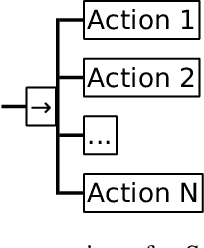
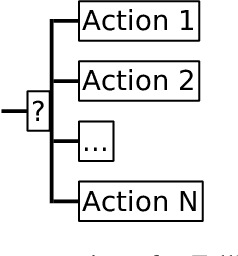
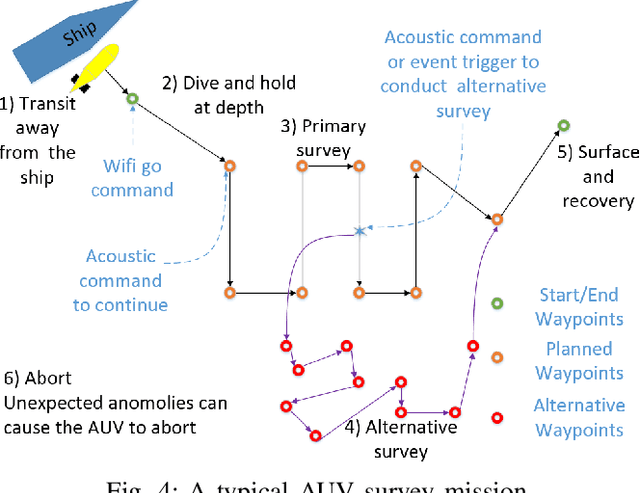
In this paper, we show how behaviour trees (BTs) can be used to design modular, versatile, and robust control architectures for mission-critical systems. In particular, we show this in the context of autonomous underwater vehicles (AUVs). Robustness, in terms of system safety, is important since manual recovery of AUVs is often extremely difficult. Further more, versatility is important to be able to execute many different kinds of missions. Finally, modularity is needed to achieve a combination of robustness and versatility, as the complexity of a versatile systems needs to be encapsulated in modules, in order to create a simple overall structure enabling robustness analysis. The proposed design is illustrated using a typical AUV mission.