 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Navigate in Complex Environments
Jan 13, 2017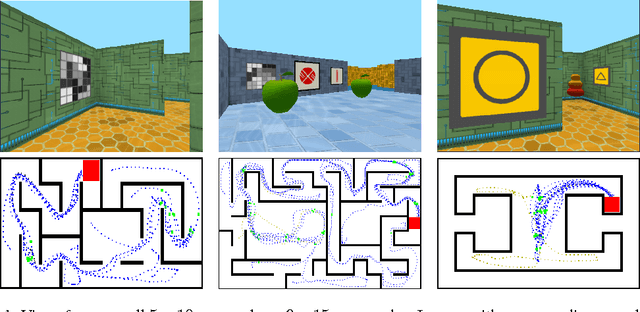
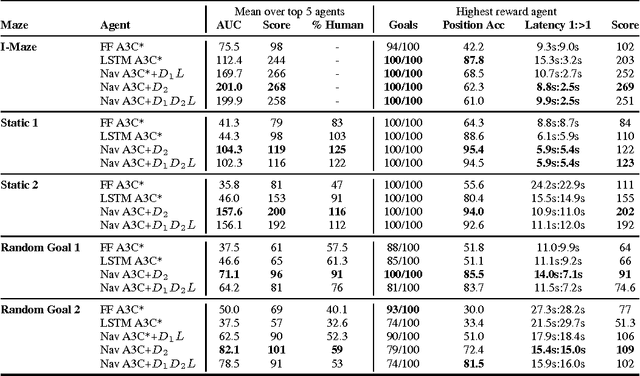
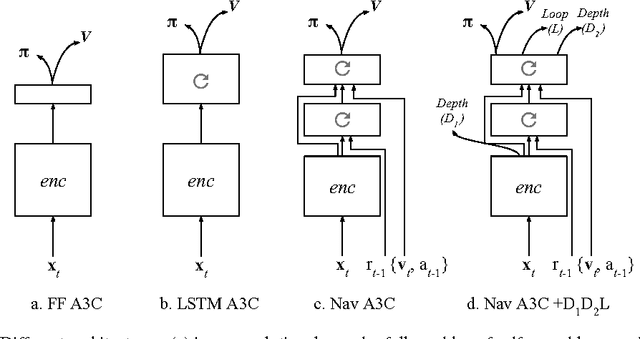
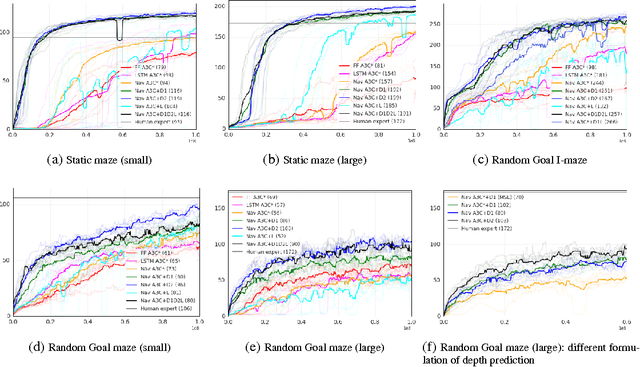
Learning to navigate in complex environments with dynamic elements is an important milestone in developing AI agents. In this work we formulate the navigation question as a reinforcement learning problem and show that data efficiency and task performance can be dramatically improved by relying on additional auxiliary tasks leveraging multimodal sensory inputs. In particular we consider jointly learning the goal-driven reinforcement learning problem with auxiliary depth prediction and loop closure classification tasks. This approach can learn to navigate from raw sensory input in complicated 3D mazes, approaching human-level performance even under conditions where the goal location changes frequently. We provide detailed analysis of the agent behaviour, its ability to localise, and its network activity dynamics, showing that the agent implicitly learns key navigation abilities.