 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoCam: Hierarchical Path Planning for an Autonomous Auxiliary Camera in Surgical Robotics
May 15, 2025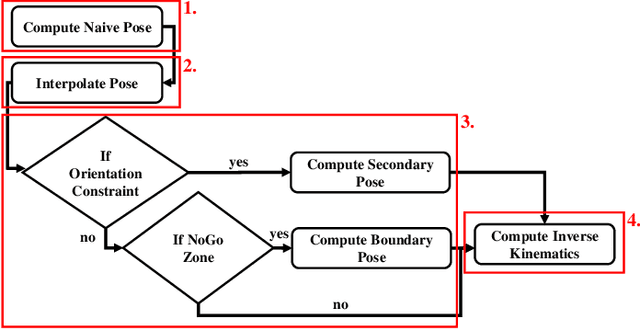

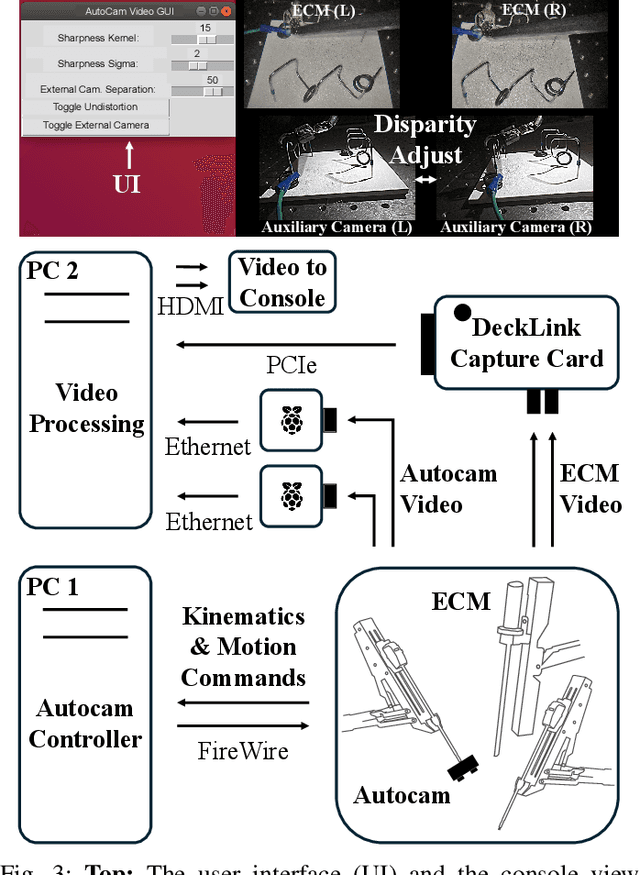
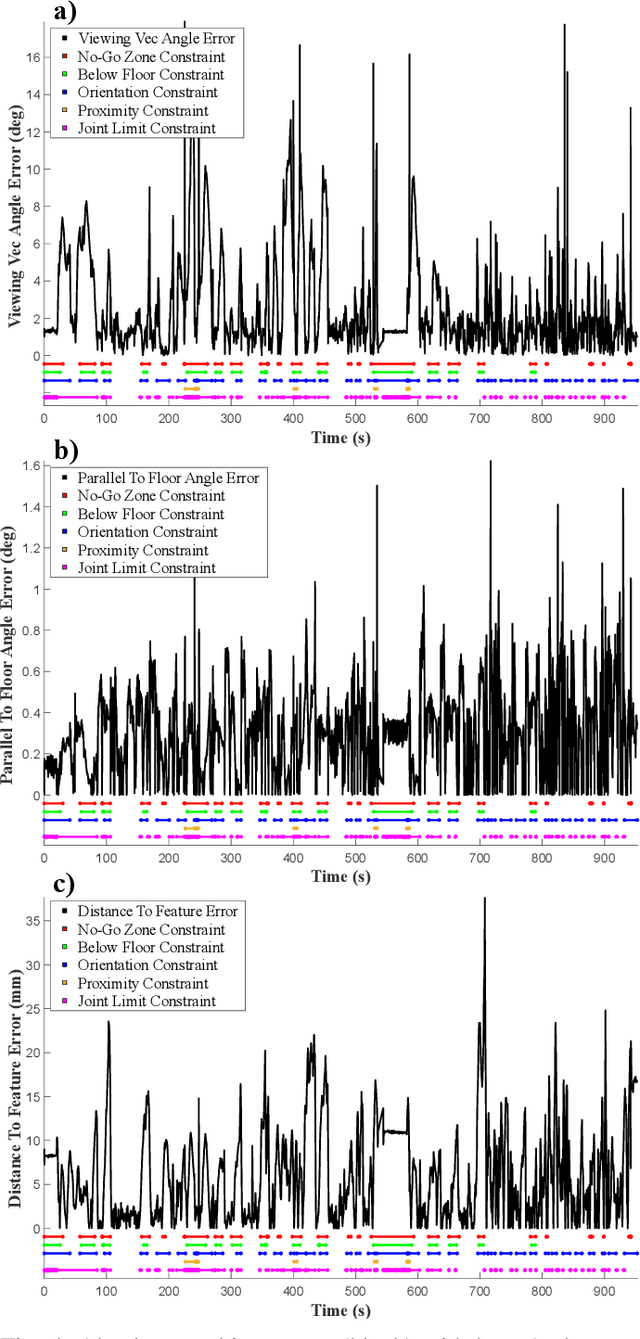
Incorporating an autonomous auxiliary camera into robot-assisted minimally invasive surgery (RAMIS) enhances spatial awareness and eliminates manual viewpoint control. Existing path planning methods for auxiliary cameras track two-dimensional surgical features but do not simultaneously account for camera orientation, workspace constraints, and robot joint limits. This study presents AutoCam: an automatic auxiliary camera placement method to improve visualization in RAMIS. Implemented on the da Vinci Research Kit, the system uses a priority-based, workspace-constrained control algorithm that combines heuristic geometric placement with nonlinear optimization to ensure robust camera tracking. A user study (N=6) demonstrated that the system maintained 99.84% visibility of a salient feature and achieved a pose error of 4.36 $\pm$ 2.11 degrees and 1.95 $\pm$ 5.66 mm. The controller was computationally efficient, with a loop time of 6.8 $\pm$ 12.8 ms. An additional pilot study (N=6), where novices completed a Fundamentals of Laparoscopic Surgery training task, suggests that users can teleoperate just as effectively from AutoCam's viewpoint as from the endoscope's while still benefiting from AutoCam's improved visual coverage of the scene. These results indicate that an auxiliary camera can be autonomously controlled using the da Vinci patient-side manipulators to track a salient feature, laying the groundwork for new multi-camera visualization methods in RAMIS.
Setup-Invariant Augmented Reality for Teaching by Demonstration with Surgical Robots
Apr 09, 2025Augmented reality (AR) is an effective tool in robotic surgery education as it combines exploratory learning with three-dimensional guidance. However, existing AR systems require expert supervision and do not account for differences in the mentor and mentee robot configurations. To enable novices to train outside the operating room while receiving expert-informed guidance, we present dV-STEAR: an open-source system that plays back task-aligned expert demonstrations without assuming identical setup joint positions between expert and novice. Pose estimation was rigorously quantified, showing a registration error of 3.86 (SD=2.01)mm. In a user study (N=24), dV-STEAR significantly improved novice performance on tasks from the Fundamentals of Laparoscopic Surgery. In a single-handed ring-over-wire task, dV-STEAR increased completion speed (p=0.03) and reduced collision time (p=0.01) compared to dry-lab training alone. During a pick-and-place task, it improved success rates (p=0.004). Across both tasks, participants using dV-STEAR exhibited significantly more balanced hand use and reported lower frustration levels. This work presents a novel educational tool implemented on the da Vinci Research Kit, demonstrates its effectiveness in teaching novices, and builds the foundation for further AR integration into robot-assisted surgery.
SurgPose: a Dataset for Articulated Robotic Surgical Tool Pose Estimation and Tracking
Feb 17, 2025Accurate and efficient surgical robotic tool pose estimation is of fundamental significance to downstream applications such as augmented reality (AR) in surgical training and learning-based autonomous manipulation. While significant advancements have been made in pose estimation for humans and animals, it is still a challenge in surgical robotics due to the scarcity of published data. The relatively large absolute error of the da Vinci end effector kinematics and arduous calibration procedure make calibrated kinematics data collection expensive. Driven by this limitation, we collected a dataset, dubbed SurgPose, providing instance-aware semantic keypoints and skeletons for visual surgical tool pose estimation and tracking. By marking keypoints using ultraviolet (UV) reactive paint, which is invisible under white light and fluorescent under UV light, we execute the same trajectory under different lighting conditions to collect raw videos and keypoint annotations, respectively. The SurgPose dataset consists of approximately 120k surgical instrument instances (80k for training and 40k for validation) of 6 categories. Each instrument instance is labeled with 7 semantic keypoints. Since the videos are collected in stereo pairs, the 2D pose can be lifted to 3D based on stereo-matching depth. In addition to releasing the dataset, we test a few baseline approaches to surgical instrument tracking to demonstrate the utility of SurgPose. More details can be found at surgpose.github.io.