 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Causal Models Enhance Robot Navigation? Online Causal Adaptation for Real-Robot Navigation
Jun 14, 2026Causality in robotics aims to produce more interpretable and flexible robot behaviours by enabling robots to predict the consequences of their actions; however, deploying causal models with existing systems (e.g., navigation) operating in real environments remains understudied. This paper addresses the challenging problem of transferring causal models in real-robot experiments for a navigation scenario. We study this problem in two ways: (i) using the causal model as an offline evaluation module that predicts the competence of recorded real-robot navigation trajectories and relates it to quantitative navigation performance, and (ii) using the causal model as an online adaptation module that intervenes when the predicted competence of the default navigation is low. We validate our approach in a physical service robot that patrols around corridors. We show that the predicted competence correlates positively with path efficiency, and negatively with path irregularities (suboptimal behaviour). The model predictions also show strong agreement with human annotations (Cohen's kappa value of 0.88). In online experiments, the proposed method improves navigation performance in complex scenarios such as cornering and obstacle avoidance, yielding higher predicted competence and better navigation metrics than the default navigation baseline. In simpler scenarios, where the baseline already performs near-optimally, the causal adaptation provides limited benefit. These results indicate that causal models are particularly effective in enhancing navigation under increased task complexity. Overall, our results demonstrate that causal models developed for behavioural interpretation can be successfully integrated into real-robot navigation systems.
Evaluating Generative Models as Interactive Emergent Representations of Human-Like Collaborative Behavior
May 05, 2026Human-AI collaboration requires AI agents to understand human behavior for effective coordination. While advances in foundation models show promising capabilities in understanding and showing human-like behavior, their application in embodied collaborative settings needs further investigation. This work examines whether embodied foundation model agents exhibit emergent collaborative behaviors indicating underlying mental models of their collaborators, which is an important aspect of effective coordination. This paper develops a 2D collaborative game environment where large language model agents and humans complete color-matching tasks requiring coordination. We define five collaborative behaviors as indicators of emergent mental model representation: perspective-taking, collaborator-aware planning, introspection, theory of mind, and clarification. An automated behavior detection system using LLM-based judges identifies these behaviors, achieving fair to substantial agreement with human annotations. Results from the automated behavior detection system show that foundation models consistently exhibit emergent collaborative behaviors without being explicitly trained to do so. These behaviors occur at varying frequencies during collaboration stages, with distinct patterns across different LLMs. A user study was also conducted to evaluate human satisfaction and perceived collaboration effectiveness, with the results indicating positive collaboration experiences. Participants appreciated the agents' task focus, plan verbalization, and initiative, while suggesting improvements in response times and human-like interactions. This work provides an experimental framework for human-AI collaboration, empirical evidence of collaborative behaviors in embodied LLM agents, a validated behavioral analysis methodology, and an assessment of collaboration effectiveness.
COFFAIL: A Dataset of Successful and Anomalous Robot Skill Executions in the Context of Coffee Preparation
Apr 20, 2026In the context of robot learning for manipulation, curated datasets are an important resource for advancing the state of the art; however, available datasets typically only include successful executions or are focused on one particular type of skill. In this short paper, we briefly describe a dataset of various skills performed in the context of coffee preparation. The dataset, which we call COFFAIL, includes both successful and anomalous skill execution episodes collected with a physical robot in a kitchen environment, a couple of which are performed with bimanual manipulation. In addition to describing the data collection setup and the collected data, the paper illustrates the use of the data in COFFAIL to learn a robot policy using imitation learning.
From Language to Action: Can LLM-Based Agents Be Used for Embodied Robot Cognition?
Mar 03, 2026In order to flexibly act in an everyday environment, a robotic agent needs a variety of cognitive capabilities that enable it to reason about plans and perform execution recovery. Large language models (LLMs) have been shown to demonstrate emergent cognitive aspects, such as reasoning and language understanding; however, the ability to control embodied robotic agents requires reliably bridging high-level language to low-level functionalities for perception and control. In this paper, we investigate the extent to which an LLM can serve as a core component for planning and execution reasoning in a cognitive robot architecture. For this purpose, we propose a cognitive architecture in which an agentic LLM serves as the core component for planning and reasoning, while components for working and episodic memories support learning from experience and adaptation. An instance of the architecture is then used to control a mobile manipulator in a simulated household environment, where environment interaction is done through a set of high-level tools for perception, reasoning, navigation, grasping, and placement, all of which are made available to the LLM-based agent. We evaluate our proposed system on two household tasks (object placement and object swapping), which evaluate the agent's reasoning, planning, and memory utilisation. The results demonstrate that the LLM-driven agent can complete structured tasks and exhibits emergent adaptation and memory-guided planning, but also reveal significant limitations, such as hallucinations about the task success and poor instruction following by refusing to acknowledge and complete sequential tasks. These findings highlight both the potential and challenges of employing LLMs as embodied cognitive controllers for autonomous robots.
Reliable Robotic Task Execution in the Face of Anomalies
Oct 27, 2025Learned robot policies have consistently been shown to be versatile, but they typically have no built-in mechanism for handling the complexity of open environments, making them prone to execution failures; this implies that deploying policies without the ability to recognise and react to failures may lead to unreliable and unsafe robot behaviour. In this paper, we present a framework that couples a learned policy with a method to detect visual anomalies during policy deployment and to perform recovery behaviours when necessary, thereby aiming to prevent failures. Specifically, we train an anomaly detection model using data collected during nominal executions of a trained policy. This model is then integrated into the online policy execution process, so that deviations from the nominal execution can trigger a three-level sequential recovery process that consists of (i) pausing the execution temporarily, (ii) performing a local perturbation of the robot's state, and (iii) resetting the robot to a safe state by sampling from a learned execution success model. We verify our proposed method in two different scenarios: (i) a door handle reaching task with a Kinova Gen3 arm using a policy trained in simulation and transferred to the real robot, and (ii) an object placing task with a UFactory xArm 6 using a general-purpose policy model. Our results show that integrating policy execution with anomaly detection and recovery increases the execution success rate in environments with various anomalies, such as trajectory deviations and adversarial human interventions.
Data-Driven Robot Fault Detection and Diagnosis Using Generative Models: A Modified SFDD Algorithm
Nov 23, 2023This paper presents a modification of the data-driven sensor-based fault detection and diagnosis (SFDD) algorithm for online robot monitoring. Our version of the algorithm uses a collection of generative models, in particular restricted Boltzmann machines, each of which represents the distribution of sliding window correlations between a pair of correlated measurements. We use such models in a residual generation scheme, where high residuals generate conflict sets that are then used in a subsequent diagnosis step. As a proof of concept, the framework is evaluated on a mobile logistics robot for the problem of recognising disconnected wheels, such that the evaluation demonstrates the feasibility of the framework (on the faulty data set, the models obtained 88.6% precision and 75.6% recall rates), but also shows that the monitoring results are influenced by the choice of distribution model and the model parameters as a whole.
Adaptive Compliant Robot Control with Failure Recovery for Object Press-Fitting
Jul 17, 2023Loading of shipping containers for dairy products often includes a press-fit task, which involves manually stacking milk cartons in a container without using pallets or packaging. Automating this task with a mobile manipulator can reduce worker strain, and also enhance the efficiency and safety of the container loading process. This paper proposes an approach called Adaptive Compliant Control with Integrated Failure Recovery (ACCIFR), which enables a mobile manipulator to reliably perform the press-fit task. We base the approach on a demonstration learning-based compliant control framework, such that we integrate a monitoring and failure recovery mechanism for successful task execution. Concretely, we monitor the execution through distance and force feedback, detect collisions while the robot is performing the press-fit task, and use wrench measurements to classify the direction of collision; this information informs the subsequent recovery process. We evaluate the method on a miniature container setup, considering variations in the (i) starting position of the end effector, (ii) goal configuration, and (iii) object grasping position. The results demonstrate that the proposed approach outperforms the baseline demonstration-based learning framework regarding adaptability to environmental variations and the ability to recover from collision failures, making it a promising solution for practical press-fit applications.
Learning Human Body Motions from Skeleton-Based Observations for Robot-Assisted Therapy
Jul 25, 2022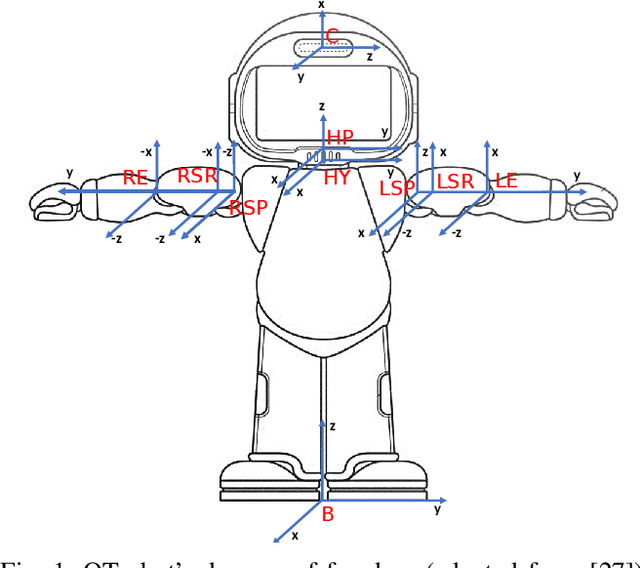
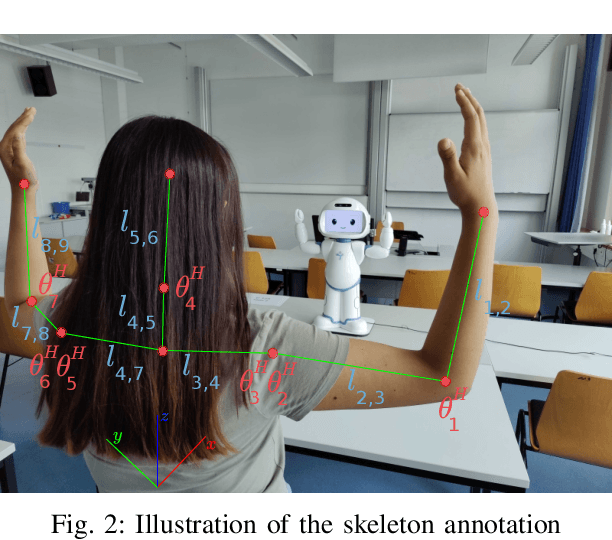
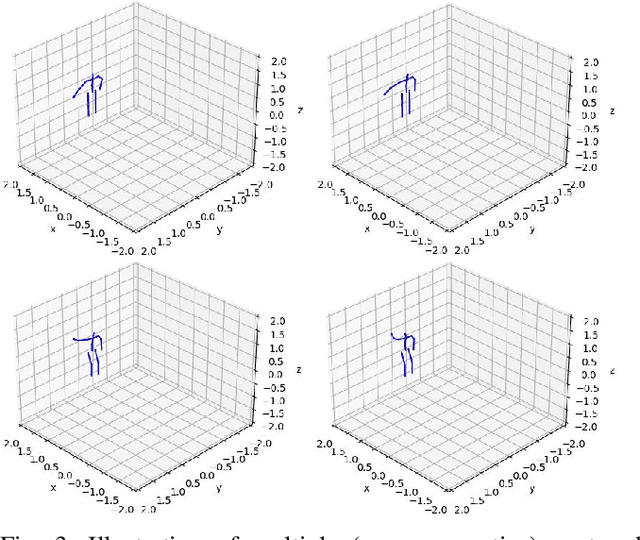
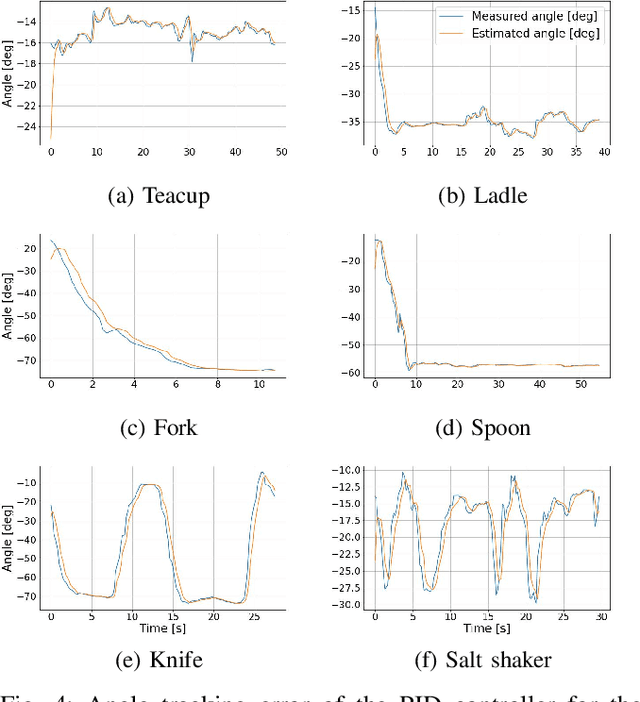
Robots applied in therapeutic scenarios, for instance in the therapy of individuals with Autism Spectrum Disorder, are sometimes used for imitation learning activities in which a person needs to repeat motions by the robot. To simplify the task of incorporating new types of motions that a robot can perform, it is desirable that the robot has the ability to learn motions by observing demonstrations from a human, such as a therapist. In this paper, we investigate an approach for acquiring motions from skeleton observations of a human, which are collected by a robot-centric RGB-D camera. Given a sequence of observations of various joints, the joint positions are mapped to match the configuration of a robot before being executed by a PID position controller. We evaluate the method, in particular the reproduction error, by performing a study with QTrobot in which the robot acquired different upper-body dance moves from multiple participants. The results indicate the method's overall feasibility, but also indicate that the reproduction quality is affected by noise in the skeleton observations.
Personalised Robot Behaviour Modelling for Robot-Assisted Therapy in the Context of Autism Spectrum Disorder
Jul 25, 2022
In robot-assisted therapy for individuals with Autism Spectrum Disorder, the workload of therapists during a therapeutic session is increased if they have to control the robot manually. To allow therapists to focus on the interaction with the person instead, the robot should be more autonomous, namely it should be able to interpret the person's state and continuously adapt its actions according to their behaviour. In this paper, we develop a personalised robot behaviour model that can be used in the robot decision-making process during an activity; this behaviour model is trained with the help of a user model that has been learned from real interaction data. We use Q-learning for this task, such that the results demonstrate that the policy requires about 10,000 iterations to converge. We thus investigate policy transfer for improving the convergence speed; we show that this is a feasible solution, but an inappropriate initial policy can lead to a suboptimal final return.
Deploying Robots in Everyday Environments: Towards Dependable and Practical Robotic Systems
Jun 25, 2022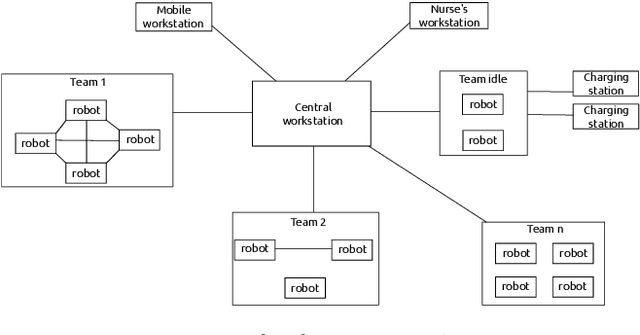
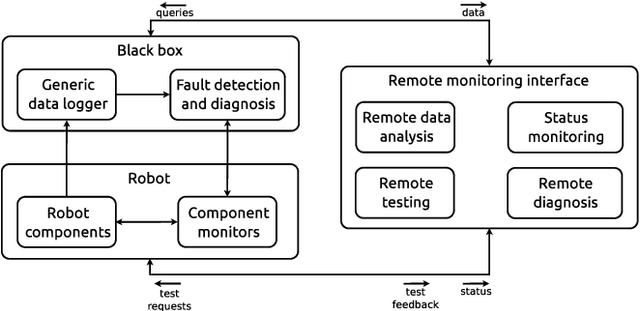
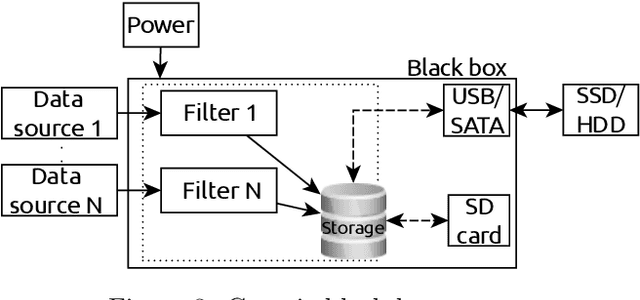
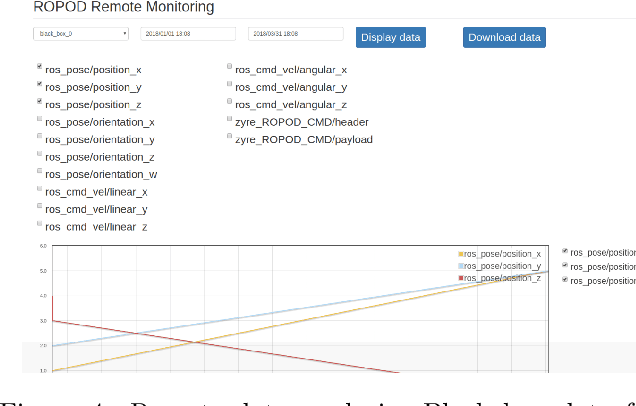
Robot deployment in realistic dynamic environments is a challenging problem despite the fact that robots can be quite skilled at a large number of isolated tasks. One reason for this is that robots are rarely equipped with powerful introspection capabilities, which means that they cannot always deal with failures in a reasonable manner; in addition, manual diagnosis is often a tedious task that requires technicians to have a considerable set of robotics skills. In this paper, we discuss our ongoing efforts - in the context of the ROPOD project - to address some of these problems. In particular, we (i) present our early efforts at developing a robotic black box and consider some factors that complicate its design, (ii) explain our component and system monitoring concept, and (iii) describe the necessity for remote monitoring and experimentation as well as our initial attempts at performing those. Our preliminary work opens a range of promising directions for making robots more usable and reliable in practice - not only in the context of ROPOD, but in a more general sense as well.