 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComprehensive mm-Wave FMCW Radar Dataset for Vital Sign Monitoring: Embracing Extreme Physiological Scenarios
May 21, 2024Recent advancements in non-invasive health monitoring technologies underscore the potential of mm-Wave Frequency-Modulated Continuous Wave (FMCW) radar in real-time vital sign detection. This paper introduces a novel dataset, the first of its kind, derived from mm-Wave FMCW radar, meticulously capturing heart rate and respiratory rate under various conditions. Comprising data from ten participants, including scenarios with elevated heart rates and participants with diverse physiological profiles such as asthma and meditation practitioners, this dataset is validated against the Polar H10 sensor, ensuring its reliability for scientific research. This dataset can offer a significant resource for developing and testing algorithms aimed at non-invasive health monitoring, promising to facilitate advancements in remote health monitoring technologies.
Non-Invasive Monitoring of Vital Signs in Calves Using Thermal Imaging Technology
May 19, 2024This study presents a non-invasive method using thermal imaging to estimate heart and respiration rates in calves, avoiding the stress from wearables. Using Kernelised Correlation Filters (KCF) for movement tracking and advanced signal processing, we targeted one ROI for respiration and four for heart rate based on their thermal correlation. Achieving Mean Absolute Percentage Errors (MAPE) of 3.08% for respiration and 3.15% for heart rate validates the efficacy of thermal imaging in vital signs monitoring, offering a practical, less intrusive tool for Precision Livestock Farming (PLF), improving animal welfare and management.
Aerial Vehicles Tracking Using Noncoherent Crowdsourced Wireless Networks
Aug 02, 2021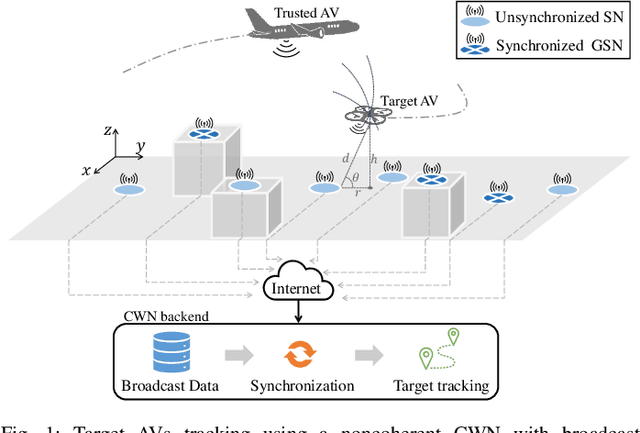
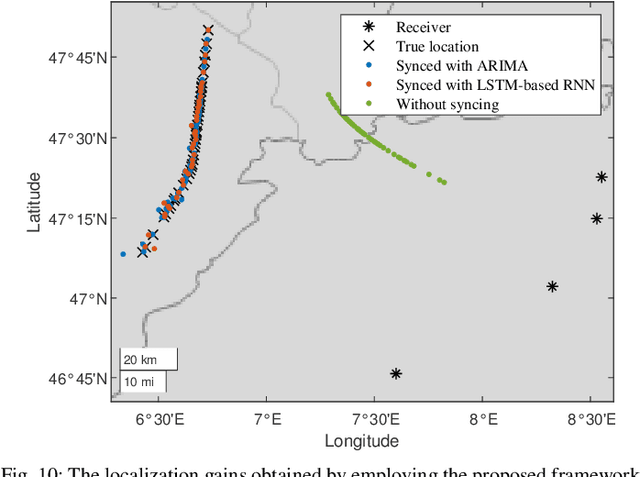
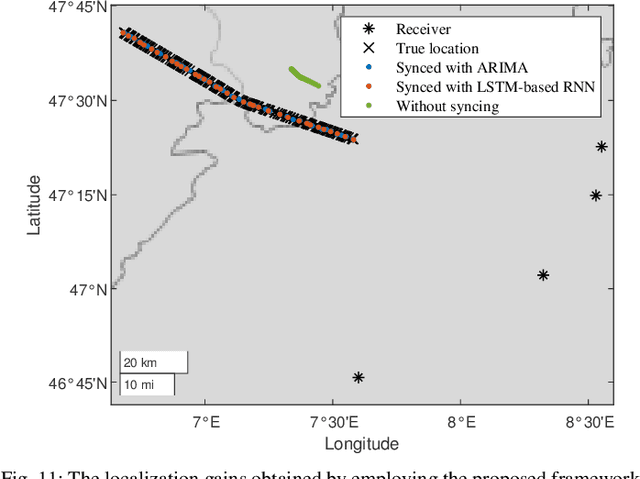
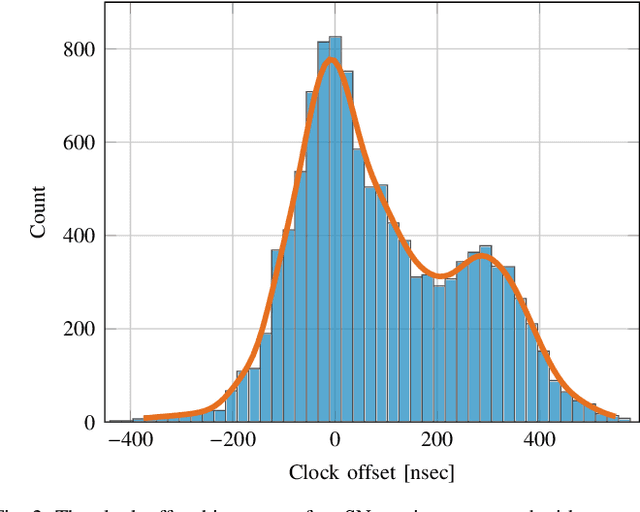
Air traffic management (ATM) of manned and unmanned aerial vehicles (AVs) relies critically on ubiquitous location tracking. While technologies exist for AVs to broadcast their location periodically and for airports to track and detect AVs, methods to verify the broadcast locations and complement the ATM coverage are urgently needed, addressing anti-spoofing and safe coexistence concerns. In this work, we propose an ATM solution by exploiting noncoherent crowdsourced wireless networks (CWNs) and correcting the inherent clock-synchronization problems present in such non-coordinated sensor networks. While CWNs can provide a great number of measurements for ubiquitous ATM, these are normally obtained from unsynchronized sensors. This article first presents an analysis of the effects of lack of clock synchronization in ATM with CWN and provides solutions based on the presence of few trustworthy sensors in a large non-coordinated network. Secondly, autoregressive-based and long short-term memory (LSTM)-based approaches are investigated to achieve the time synchronization needed for localization of the AVs. Finally, a combination of a multilateration (MLAT) method and a Kalman filter is employed to provide an anti-spoofing tracking solution for AVs. We demonstrate the performance advantages of our framework through a dataset collected by a real-world CWN. Our results show that the proposed framework achieves localization accuracy comparable to that acquired using only GPS-synchronized sensors and outperforms the localization accuracy obtained based on state-of-the-art CWN synchronization methods.
Energy Aware Deep Reinforcement Learning Scheduling for Sensors Correlated in Time and Space
Nov 19, 2020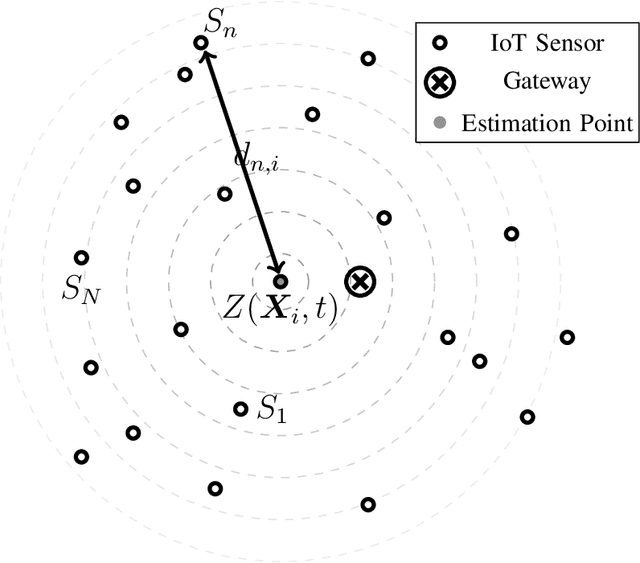
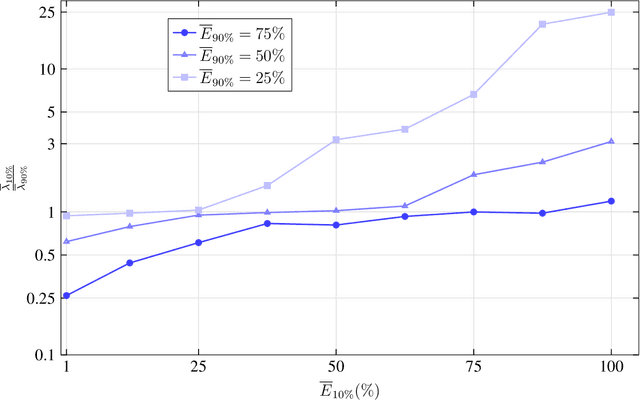
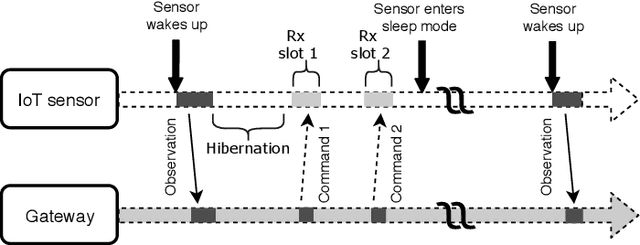
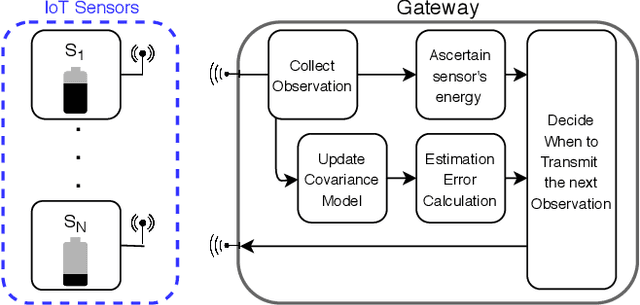
Millions of battery-powered sensors deployed for monitoring purposes in a multitude of scenarios, e.g., agriculture, smart cities, industry, etc., require energy-efficient solutions to prolong their lifetime. When these sensors observe a phenomenon distributed in space and evolving in time, it is expected that collected observations will be correlated in time and space. In this paper, we propose a Deep Reinforcement Learning (DRL) based scheduling mechanism capable of taking advantage of correlated information. We design our solution using the Deep Deterministic Policy Gradient (DDPG) algorithm. The proposed mechanism is capable of determining the frequency with which sensors should transmit their updates, to ensure accurate collection of observations, while simultaneously considering the energy available. To evaluate our scheduling mechanism, we use multiple datasets containing environmental observations obtained in multiple real deployments. The real observations enable us to model the environment with which the mechanism interacts as realistically as possible. We show that our solution can significantly extend the sensors' lifetime. We compare our mechanism to an idealized, all-knowing scheduler to demonstrate that its performance is near-optimal. Additionally, we highlight the unique feature of our design, energy-awareness, by displaying the impact of sensors' energy levels on the frequency of updates.