 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-/Uni-Cast Non-Orthogonal Multiple Access-Based INAC
May 26, 2026With the rapid development of satellite communication and navigation, there is an urgent need to integrate both technologies to achieve reliable communication and precise navigation services within the same satellite system. By combining multi-/uni-cast (MUC) and non-orthogonal multiple access (NOMA) technologies, we propose a novel MUC-NOMA-based integrated navigation and communication (INAC) signal structure, in which the navigation and communication signals share a common pseudo noise (PN) sequence, thereby integrating satellite communication and navigation at the signal level. According to different power allocation strategies, two scenarios are defined: multi-cast-oriented (MO-) INAC and uni-cast-oriented (UO-) INAC, where a greater portion of power is assigned to either the multi-cast or the uni-cast signal, respectively. To mitigate co-channel interference, we employ successive interference cancellation (SIC) at the receiver and design a signal processing algorithm for the proposed INAC signal. Then, closed-form expressions are subsequently derived for the bit error rates (BER) of both the navigation and communication signals, along with the positioning accuracy of the navigation signal. To gain further insights, the impacts of power allocation factors and communication rates are evaluated. Our analysis results show that: i) In the MO-INAC scenario, the positioning and BER performance of navigation signal are excellent when more power is assigned to the multi-cast signal; ii) In the UO-INAC scenario, interference in the shared resources is reduced when more power is assigned to the uni-cast signal; iii) The ranging accuracy decreases as the communication data rate increases. Numerical results confirm the superior BER and positioning accuracy of the MO-INAC scenario for MEO satellites.
Disaggregated multi-domain interference classification for O-RAN
Apr 13, 2026Spectrum sharing and dynamic spectrum reuse are becoming increasingly critical in modern wireless networks to address spectrum scarcity. However, these techniques inevitably increase Cross-Technology Interference (CTI). In this context, the Open Radio Access Network (O-RAN), as a modern and disaggregated network architecture, necessitates accurate, low-latency, and computationally efficient CTI classification and mitigation to support real-time control and maintain Quality of Service (QoS). Unfortunately, existing solutions predominantly rely on high-complexity, monolithic deep learning-based solutions that, while achieving high classification accuracy, incur significant latency and computational overhead This paper exploits the O-RAN functional split to leverage multi-domain raw signal representations (time, frequency, and Channel State Information (CSI)) directly from the same data stream. Each domain is processed locally, naturally interleaving CTI within the distributed, disaggregated O-RAN architecture. This distributed strategy enables a cost-aware, multi-domain fusion architecture that balances classification accuracy with computational overhead and latency. Our proposed multi-domain distributed architecture achieves a 400 $μs$ inference latency on standard CPUs. Compared to a state-of-the-art monolithic frequency-domain classifier, this represents an average 9x reduction in latency and an 11-fold decrease in computational cost, while sacrificing only 4% in classification performance and maintaining >90% accuracy in high-interference conditions.
Sequential Processing Strategies in Fronthaul Constrained Cell-Free Massive MIMO Networks
Jan 28, 2026In a cell-free massive MIMO (CFmMIMO) network with a daisy-chain fronthaul, the amount of information that each access point (AP) needs to communicate with the next AP in the chain is determined by the location of the AP in the sequential fronthaul. Therefore, we propose two sequential processing strategies to combat the adverse effect of fronthaul compression on the sum of users' spectral efficiency (SE): 1) linearly increasing fronthaul capacity allocation among APs and 2) Two-Path users' signal estimation. The two strategies show superior performance in terms of sum SE compared to the equal fronthaul capacity allocation and Single-Path sequential signal estimation.
Dualband OFDM Delay Estimation for Multi-Target Localization
Jan 26, 2026Integrated localization and communication systems aim to reuse communication waveforms for simultaneous data transmission and localization, but delay resolution is fundamentally limited by the available bandwidth. In practice, large contiguous bandwidths are difficult to obtain due to hardware constraints and spectrum fragmentation. Aggregating non-contiguous narrow bands can increase the effective frequency span, but a non-contiguous frequency layout introduces challenges such as elevated sidelobes and ambiguity in delay estimation. This paper introduces a point-spread-function (PSF)-centric framework for dual-band OFDM delay estimation. We model the observed delay profile as the convolution of the true target response with a PSF determined by the dual-band subcarrier selection pattern, explicitly linking band configuration to resolution and ambiguity. To suppress PSF-induced artifacts, we adapt the RELAX algorithm for dual-band multi-target delay estimation. Simulations demonstrate improved robustness and accuracy in dual-band scenarios, supporting ILC under fragmented spectrum.
Robust Localization in OFDM-Based Massive MIMO through Phase Offset Calibration
Jan 20, 2026Accurate localization in Orthogonal Frequency Division Multiplexing (OFDM)-based massive Multiple-Input Multiple-Output (MIMO) systems depends critically on phase coherence across subcarriers and antennas. However, practical systems suffer from frequency-dependent and (spatial) antenna-dependent phase offsets, degrading localization accuracy. This paper analytically studies the impact of phase incoherence on localization performance under a static User Equipment (UE) and Line-of-Sight (LoS) scenario. We use two complementary tools. First, we derive the Cramér-Rao Lower Bound (CRLB) to quantify the theoretical limits under phase offsets. Then, we develop a Spatial Ambiguity Function (SAF)-based model to characterize ambiguity patterns. Simulation results reveal that spatial phase offsets severely degrade localization performance, while frequency phase offsets have a minor effect in the considered system configuration. To address this, we propose a robust Channel State Information (CSI) calibration framework and validate it using real-world measurements from a practical massive MIMO testbed. The experimental results confirm that the proposed calibration framework significantly improves the localization Root Mean Squared Error (RMSE) from 5 m to 1.2 cm, aligning well with the theoretical predictions.
Inter-Cell Interference Rejection Based on Ultrawideband Walsh-Domain Wireless Autoencoding
Jan 16, 2026This paper proposes a novel technique for rejecting partial-in-band inter-cell interference (ICI) in ultrawideband communication systems. We present the design of an end-to-end wireless autoencoder architecture that jointly optimizes the transmitter and receiver encoding/decoding in the Walsh domain to mitigate interference from coexisting narrower-band 5G base stations. By exploiting the orthogonality and self-inverse properties of Walsh functions, the system distributes and learns to encode bit-words across parallel Walsh branches. Through analytical modeling and simulation, we characterize how 5G CPOFDM interference maps into the Walsh domain and identify optimal ratios of transmission frequencies and sampling rate where the end-to-end autoencoder achieves the highest rejection. Experimental results show that the proposed autoencoder achieves up to 12 dB of ICI rejection while maintaining a low block error rate (BLER) for the same baseline channel noise, i.e., baseline Signal-to-Noise-Ratio (SNR) without the interference.
Efficient Channel Autoencoders for Wideband Communications leveraging Walsh-Hadamard interleaving
Jan 16, 2026This paper investigates how end-to-end (E2E) channel autoencoders (AEs) can achieve energy-efficient wideband communications by leveraging Walsh-Hadamard (WH) interleaved converters. WH interleaving enables high sampling rate analog-digital conversion with reduced power consumption using an analog WH transformation. We demonstrate that E2E-trained neural coded modulation can transparently adapt to the WH-transceiver hardware without requiring algorithmic redesign. Focusing on the short block length regime, we train WH-domain AEs and benchmark them against standard neural and conventional baselines, including 5G Polar codes. We quantify the system-level energy tradeoffs among baseband compute, channel signal-to-noise ratio (SNR), and analog converter power. Our analysis shows that the proposed WH-AE system can approach conventional Polar code SNR performance within 0.14dB while consuming comparable or lower system power. Compared to the best neural baseline, WH-AE achieves, on average, 29% higher energy efficiency (in bit/J) for the same reliability. These findings establish WH-domain learning as a viable path to energy-efficient, high-throughput wideband communications by explicitly balancing compute complexity, SNR, and analog power consumption.
Location-Informed Interference Suppression Precoding Methods for Distributed Massive MIMO Systems
Nov 07, 2025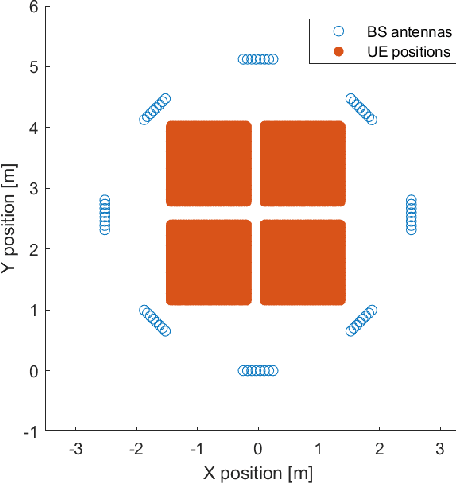
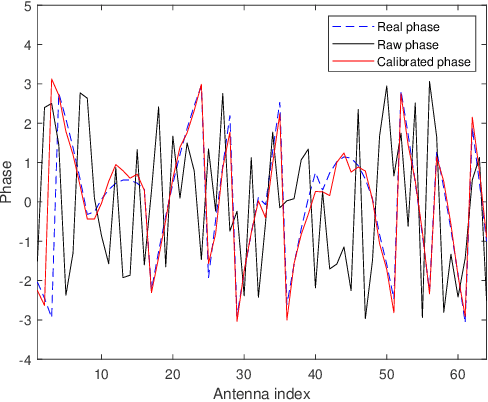
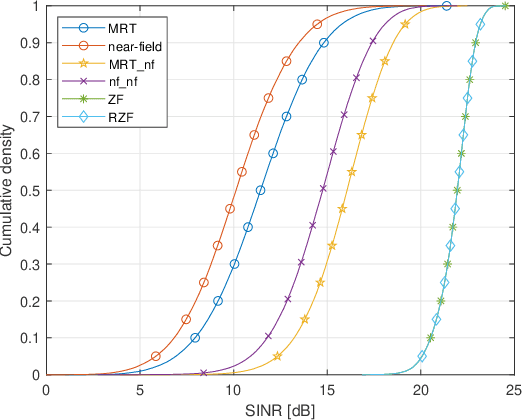
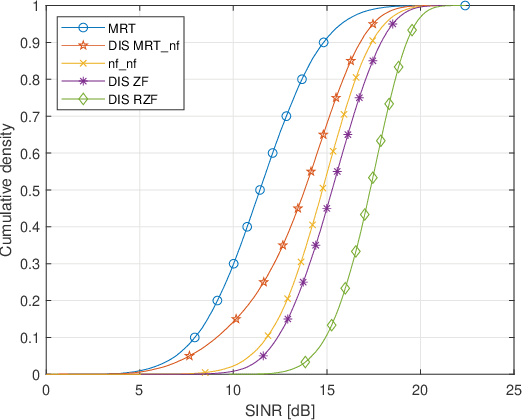
The evolution of mobile networks towards user-centric cell-free distributed Massive MIMO configurations requires the development of novel signal processing techniques. More specifically, digital precoding algorithms have to be designed or adopted to enable distributed operation. Future deployments are expected to improve coexistence between cellular generations, and between mobile networks and incumbent services such as radar. In dense cell-free deployments, it might also not be possible to have full channel state information for all users at all antennas. To leverage location information in a dense deployment area, we suggest and investigate several algorithmic alterations on existing precoding methods, aimed at location-informed interference suppression, for usage in existing and emerging systems where user locations are known. The proposed algorithms are derived using a theoretical channel model and validated and numerically evaluated using an empirical dataset containing channel measurements from an indoor distributed Massive MIMO testbed. When dealing with measured CSI, the impact of the hardware, in addition to the location-based channel, needs to be compensated for. We propose a method to calibrate the hardware and achieve measurement-based evaluation of our location-based interference suppression algorithms. The results demonstrate that the proposed methods allow location-based interference suppression without explicit CSI knowledge at the transmitter, under certain realistic network conditions.
Approximation of the Range Ambiguity Function in Near-field Sensing Systems
Sep 26, 2025



This paper investigates the range ambiguity function of near-field systems where bandwidth and near-field beamfocusing jointly determine the resolution. First, the general matched filter ambiguity function is derived and the near-field array factors of different antenna array geometries are introduced. Next, the near-field ambiguity function is approximated as a product of the range-dependent near-field array factor and the ambiguity function due to the utilized bandwidth and waveform. An approximation criterion based on the aperture-bandwidth product is formulated, and its accuracy is examined. Finally, the improvements to the ambiguity function offered by the near-field beamfocusing, as compared to the far-field case, are presented. The performance gains are evaluated in terms of resolution improvement offered by beamfocusing, peak-to-sidelobe and integrated-sidelobe level improvement. The gains offered by the near-field regime are shown to be range-dependent and substantial only in close proximity to the array.
Near-Field Spatial non-Stationary Channel Estimation: Visibility-Region-HMM-Aided Polar-Domain Simultaneous OMP
Aug 06, 2025This work focuses on channel estimation in extremely large aperture array (ELAA) systems, where near-field propagation and spatial non-stationarity introduce complexities that hinder the effectiveness of traditional estimation techniques. A physics-based hybrid channel model is developed, incorporating non-binary visibility region (VR) masks to simulate diffraction-induced power variations across the antenna array. To address the estimation challenges posed by these channel conditions, a novel algorithm is proposed: Visibility-Region-HMM-Aided Polar-Domain Simultaneous Orthogonal Matching Pursuit (VR-HMM-P-SOMP). The method extends a greedy sparse recovery framework by integrating VR estimation through a hidden Markov model (HMM), using a novel emission formulation and Viterbi decoding. This allows the algorithm to adaptively mask steering vectors and account for spatial non-stationarity at the antenna level. Simulation results demonstrate that the proposed method enhances estimation accuracy compared to existing techniques, particularly in low-SNR and sparse scenarios, while maintaining a low computational complexity. The algorithm presents robustness across a range of design parameters and channel conditions, offering a practical solution for ELAA systems.