 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAffordance Learning for End-to-End Visuomotor Robot Control
Mar 10, 2019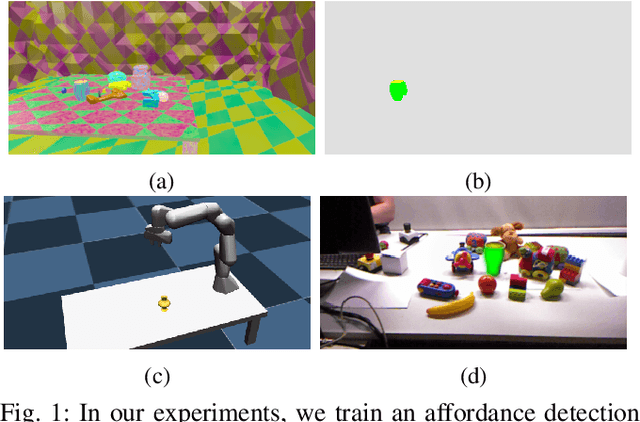
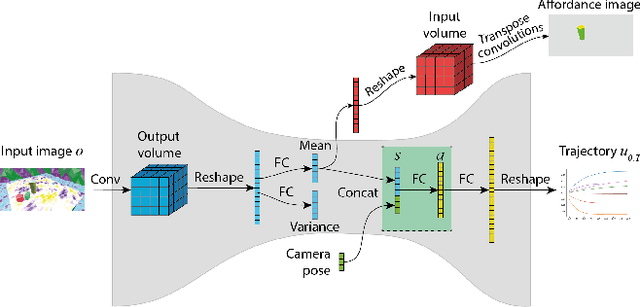
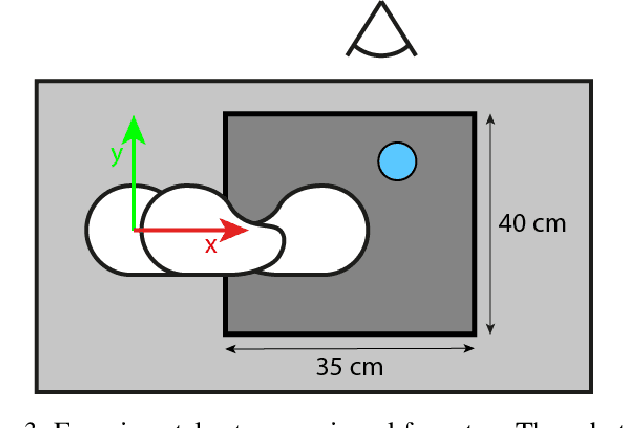
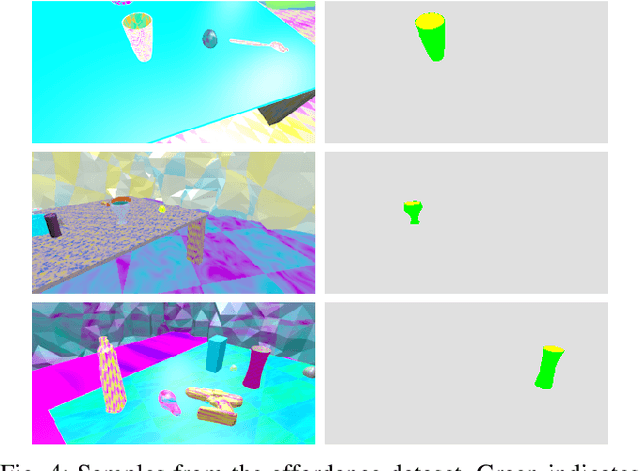
Training end-to-end deep robot policies requires a lot of domain-, task-, and hardware-specific data, which is often costly to provide. In this work, we propose to tackle this issue by employing a deep neural network with a modular architecture, consisting of separate perception, policy, and trajectory parts. Each part of the system is trained fully on synthetic data or in simulation. The data is exchanged between parts of the system as low-dimensional latent representations of affordances and trajectories. The performance is then evaluated in a zero-shot transfer scenario using Franka Panda robot arm. Results demonstrate that a low-dimensional representation of scene affordances extracted from an RGB image is sufficient to successfully train manipulator policies. We also introduce a method for affordance dataset generation, which is easily generalizable to new tasks, objects and environments, and requires no manual pixel labeling.