 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImbalanced Data Learning by Minority Class Augmentation using Capsule Adversarial Networks
Apr 08, 2020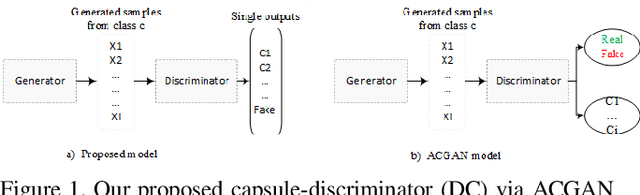

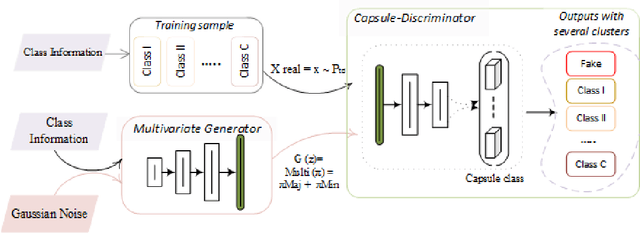
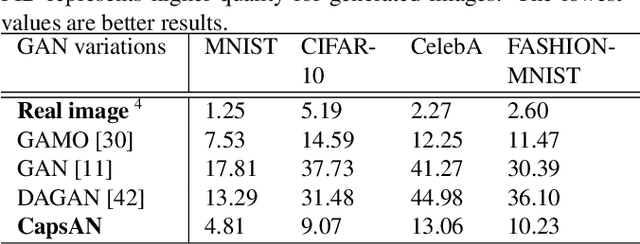
The fact that image datasets are often imbalanced poses an intense challenge for deep learning techniques. In this paper, we propose a method to restore the balance in imbalanced images, by coalescing two concurrent methods, generative adversarial networks (GANs) and capsule network. In our model, generative and discriminative networks play a novel competitive game, in which the generator generates samples towards specific classes from multivariate probabilities distribution. The discriminator of our model is designed in a way that while recognizing the real and fake samples, it is also requires to assign classes to the inputs. Since GAN approaches require fully observed data during training, when the training samples are imbalanced, the approaches might generate similar samples which leading to data overfitting. This problem is addressed by providing all the available information from both the class components jointly in the adversarial training. It improves learning from imbalanced data by incorporating the majority distribution structure in the generation of new minority samples. Furthermore, the generator is trained with feature matching loss function to improve the training convergence. In addition, prevents generation of outliers and does not affect majority class space. The evaluations show the effectiveness of our proposed methodology; in particular, the coalescing of capsule-GAN is effective at recognizing highly overlapping classes with much fewer parameters compared with the convolutional-GAN.
Innovative 3D Depth Map Generation From A Holoscopic 3D Image Based on Graph Cut Technique
Nov 10, 2018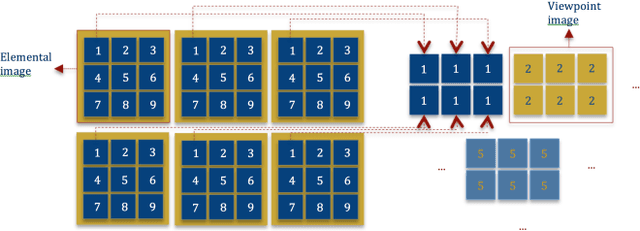

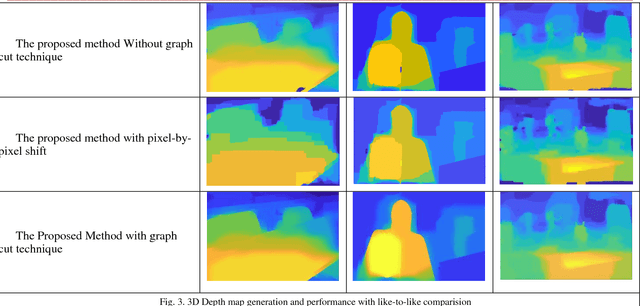
Holoscopic 3D imaging is a promising technique for capturing full colour spatial 3D images using a single aperture holoscopic 3D camera. It mimics fly's eye technique with a microlens array, which views the scene at a slightly different angle to its adjacent lens that records three dimensional information onto a two dimensional surface. This paper proposes a method of depth map generation from a holoscopic 3D image based on graph cut technique. The principal objective of this study is to estimate the depth information presented in a holoscopic 3D image with high precision. As such, depth map extraction is measured from a single still holoscopic 3D image which consists of multiple viewpoint images. The viewpoints are extracted and utilised for disparity calculation via disparity space image technique and pixels displacement is measured with sub pixel accuracy to overcome the issue of the narrow baseline between the viewpoint images for stereo matching. In addition, cost aggregation is used to correlate the matching costs within a particular neighbouring region using sum of absolute difference SAD combined with gradient-based metric and winner takes all algorithm is employed to select the minimum elements in the array as optimal disparity value. Finally, the optimal depth map is obtained using graph cut technique. The proposed method extends the utilisation of holoscopic 3D imaging system and enables the expansion of the technology for various applications of autonomous robotics, medical, inspection, AR VR, security and entertainment where 3D depth sensing and measurement are a concern.