 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgepathplanning
Papers and Code
VLM-RRT: Vision Language Model Guided RRT Search for Autonomous UAV Navigation
May 29, 2025Path planning is a fundamental capability of autonomous Unmanned Aerial Vehicles (UAVs), enabling them to efficiently navigate toward a target region or explore complex environments while avoiding obstacles. Traditional pathplanning methods, such as Rapidly-exploring Random Trees (RRT), have proven effective but often encounter significant challenges. These include high search space complexity, suboptimal path quality, and slow convergence, issues that are particularly problematic in high-stakes applications like disaster response, where rapid and efficient planning is critical. To address these limitations and enhance path-planning efficiency, we propose Vision Language Model RRT (VLM-RRT), a hybrid approach that integrates the pattern recognition capabilities of Vision Language Models (VLMs) with the path-planning strengths of RRT. By leveraging VLMs to provide initial directional guidance based on environmental snapshots, our method biases sampling toward regions more likely to contain feasible paths, significantly improving sampling efficiency and path quality. Extensive quantitative and qualitative experiments with various state-of-the-art VLMs demonstrate the effectiveness of this proposed approach.
Decentralised Approach for Multi Agent Path Finding
Jun 03, 2021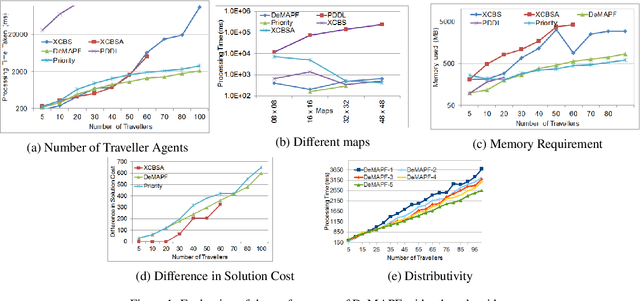
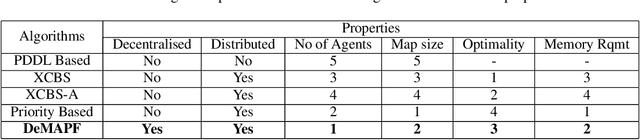
Multi Agent Path Finding (MAPF) requires identification of conflict free paths for agents which could be point-sized or with dimensions. In this paper, we propose an approach for MAPF for spatially-extended agents. These find application in real world problems like Convoy Movement Problem, Train Scheduling etc. Our proposed approach, Decentralised Multi Agent Path Finding (DeMAPF), handles MAPF as a sequence of pathplanning and allocation problems which are solved by two sets of agents Travellers and Routers respectively, over multiple iterations. The approach being decentralised allows an agent to solve the problem pertinent to itself, without being aware of other agents in the same set. This allows the agents to be executed on independent machines, thereby leading to scalability to handle large sized problems. We prove, by comparison with other distributed approaches, that the approach leads to a faster convergence to a conflict-free solution, which may be suboptimal, with lesser memory requirement.
Exploration-RRT: A multi-objective Path Planning and Exploration Framework for Unknown and Unstructured Environments
Apr 08, 2021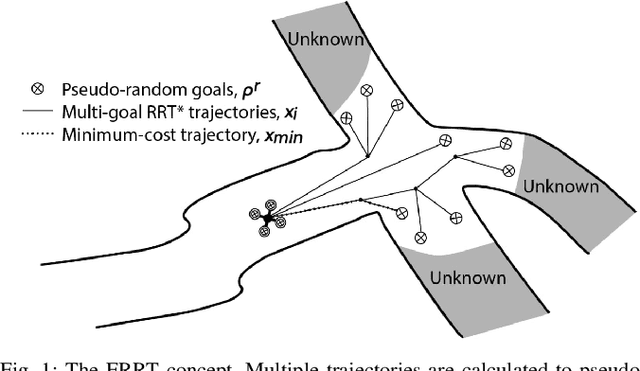
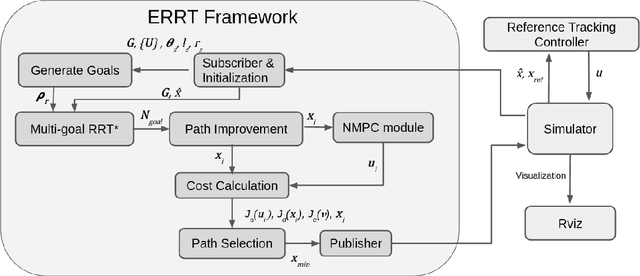
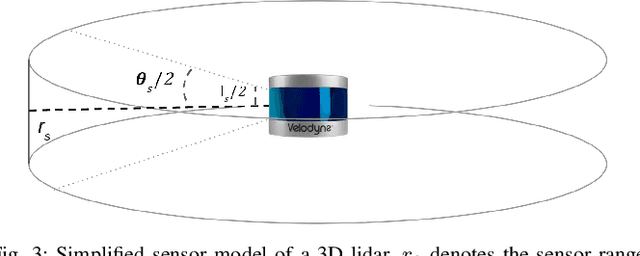
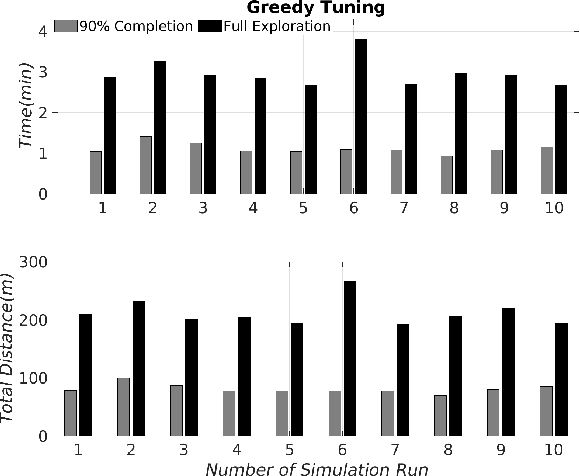
This article establishes the Exploration-RRT algorithm: A novel general-purpose combined exploration and pathplanning algorithm, based on a multi-goal Rapidly-Exploring Random Trees (RRT) framework. Exploration-RRT (ERRT) has been specifically designed for utilization in 3D exploration missions, with partially or completely unknown and unstructured environments. The novel proposed ERRT is based on a multi-objective optimization framework and it is able to take under consideration the potential information gain, the distance travelled, and the actuation costs, along trajectories to pseudo-random goals, generated from considering the on-board sensor model and the non-linear model of the utilized platform. In this article, the algorithmic pipeline of the ERRT will be established and the overall applicability and efficiency of the proposed scheme will be presented on an application with an Unmanned Aerial Vehicle (UAV) model, equipped with a 3D lidar, in a simulated operating environment, with the goal of exploring a completely unknown area as efficiently and quickly as possible