 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBsf
Papers and Code
PADE: A Predictor-Free Sparse Attention Accelerator via Unified Execution and Stage Fusion
Dec 16, 2025



Attention-based models have revolutionized AI, but the quadratic cost of self-attention incurs severe computational and memory overhead. Sparse attention methods alleviate this by skipping low-relevance token pairs. However, current approaches lack practicality due to the heavy expense of added sparsity predictor, which severely drops their hardware efficiency. This paper advances the state-of-the-art (SOTA) by proposing a bit-serial enable stage-fusion (BSF) mechanism, which eliminates the need for a separate predictor. However, it faces key challenges: 1) Inaccurate bit-sliced sparsity speculation leads to incorrect pruning; 2) Hardware under-utilization due to fine-grained and imbalanced bit-level workloads. 3) Tiling difficulty caused by the row-wise dependency in sparsity pruning criteria. We propose PADE, a predictor-free algorithm-hardware co-design for dynamic sparse attention acceleration. PADE features three key innovations: 1) Bit-wise uncertainty interval-enabled guard filtering (BUI-GF) strategy to accurately identify trivial tokens during each bit round; 2) Bidirectional sparsity-based out-of-order execution (BS-OOE) to improve hardware utilization; 3) Interleaving-based sparsity-tiled attention (ISTA) to reduce both I/O and computational complexity. These techniques, combined with custom accelerator designs, enable practical sparsity acceleration without relying on an added sparsity predictor. Extensive experiments on 22 benchmarks show that PADE achieves 7.43x speed up and 31.1x higher energy efficiency than Nvidia H100 GPU. Compared to SOTA accelerators, PADE achieves 5.1x, 4.3x and 3.4x energy saving than Sanger, DOTA and SOFA.
BoundMatch: Boundary detection applied to semi-supervised segmentation for urban-driving scenes
Mar 30, 2025Semi-supervised semantic segmentation (SS-SS) aims to mitigate the heavy annotation burden of dense pixel labeling by leveraging abundant unlabeled images alongside a small labeled set. While current teacher-student consistency regularization methods achieve strong results, they often overlook a critical challenge: the precise delineation of object boundaries. In this paper, we propose BoundMatch, a novel multi-task SS-SS framework that explicitly integrates semantic boundary detection into the consistency regularization pipeline. Our core mechanism, Boundary Consistency Regularized Multi-Task Learning (BCRM), enforces prediction agreement between teacher and student models on both segmentation masks and detailed semantic boundaries. To further enhance performance and sharpen contours, BoundMatch incorporates two lightweight fusion modules: Boundary-Semantic Fusion (BSF) injects learned boundary cues into the segmentation decoder, while Spatial Gradient Fusion (SGF) refines boundary predictions using mask gradients, leading to higher-quality boundary pseudo-labels. This framework is built upon SAMTH, a strong teacher-student baseline featuring a Harmonious Batch Normalization (HBN) update strategy for improved stability. Extensive experiments on diverse datasets including Cityscapes, BDD100K, SYNTHIA, ADE20K, and Pascal VOC show that BoundMatch achieves competitive performance against state-of-the-art methods while significantly improving boundary-specific evaluation metrics. We also demonstrate its effectiveness in realistic large-scale unlabeled data scenarios and on lightweight architectures designed for mobile deployment.
ARTS: Semi-Analytical Regressor using Disentangled Skeletal Representations for Human Mesh Recovery from Videos
Oct 21, 2024



Although existing video-based 3D human mesh recovery methods have made significant progress, simultaneously estimating human pose and shape from low-resolution image features limits their performance. These image features lack sufficient spatial information about the human body and contain various noises (e.g., background, lighting, and clothing), which often results in inaccurate pose and inconsistent motion. Inspired by the rapid advance in human pose estimation, we discover that compared to image features, skeletons inherently contain accurate human pose and motion. Therefore, we propose a novel semiAnalytical Regressor using disenTangled Skeletal representations for human mesh recovery from videos, called ARTS. Specifically, a skeleton estimation and disentanglement module is proposed to estimate the 3D skeletons from a video and decouple them into disentangled skeletal representations (i.e., joint position, bone length, and human motion). Then, to fully utilize these representations, we introduce a semi-analytical regressor to estimate the parameters of the human mesh model. The regressor consists of three modules: Temporal Inverse Kinematics (TIK), Bone-guided Shape Fitting (BSF), and Motion-Centric Refinement (MCR). TIK utilizes joint position to estimate initial pose parameters and BSF leverages bone length to regress bone-aligned shape parameters. Finally, MCR combines human motion representation with image features to refine the initial human model parameters. Extensive experiments demonstrate that our ARTS surpasses existing state-of-the-art video-based methods in both per-frame accuracy and temporal consistency on popular benchmarks: 3DPW, MPI-INF-3DHP, and Human3.6M. Code is available at https://github.com/TangTao-PKU/ARTS.
Bayesian Simultaneous Factorization and Prediction Using Multi-Omic Data
Nov 30, 2022Understanding of the pathophysiology of obstructive lung disease (OLD) is limited by available methods to examine the relationship between multi-omic molecular phenomena and clinical outcomes. Integrative factorization methods for multi-omic data can reveal latent patterns of variation describing important biological signal. However, most methods do not provide a framework for inference on the estimated factorization, simultaneously predict important disease phenotypes or clinical outcomes, nor accommodate multiple imputation. To address these gaps, we propose Bayesian Simultaneous Factorization (BSF). We use conjugate normal priors and show that the posterior mode of this model can be estimated by solving a structured nuclear norm-penalized objective that also achieves rank selection and motivates the choice of hyperparameters. We then extend BSF to simultaneously predict a continuous or binary response, termed Bayesian Simultaneous Factorization and Prediction (BSFP). BSF and BSFP accommodate concurrent imputation and full posterior inference for missing data, including "blockwise" missingness, and BSFP offers prediction of unobserved outcomes. We show via simulation that BSFP is competitive in recovering latent variation structure, as well as the importance of propagating uncertainty from the estimated factorization to prediction. We also study the imputation performance of BSF via simulation under missing-at-random and missing-not-at-random assumptions. Lastly, we use BSFP to predict lung function based on the bronchoalveolar lavage metabolome and proteome from a study of HIV-associated OLD. Our analysis reveals a distinct cluster of patients with OLD driven by shared metabolomic and proteomic expression patterns, as well as multi-omic patterns related to lung function decline. Software is freely available at https://github.com/sarahsamorodnitsky/BSFP .
Development and Testing of a Smart Bin toward Automated Rearing of Black Soldier Fly Larvae
Jul 09, 2022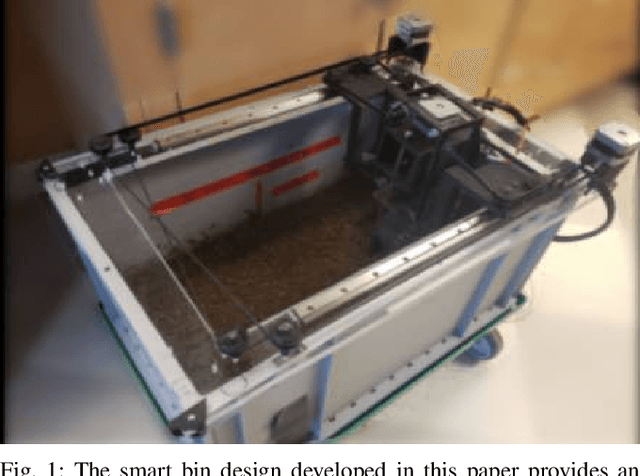
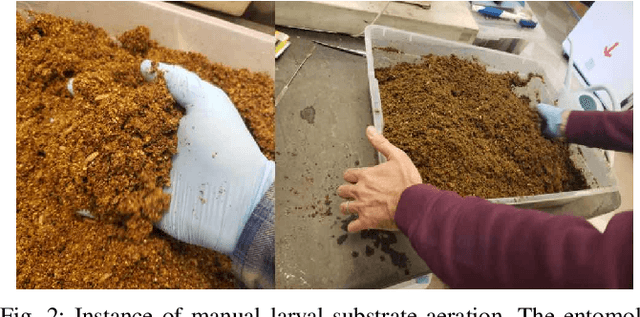
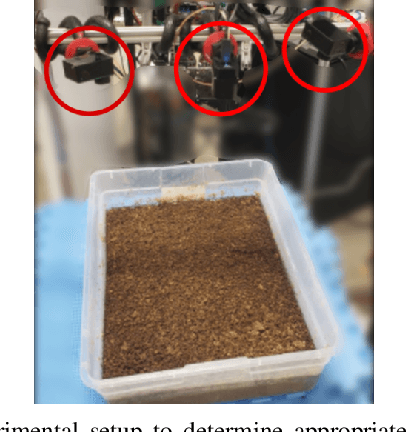
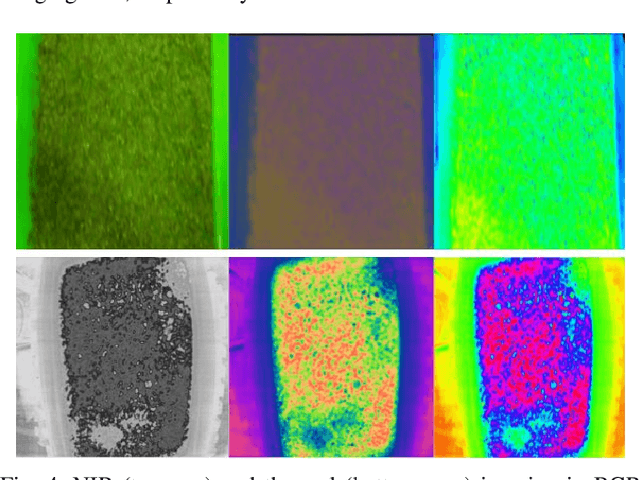
The Black Soldier Fly (BSF), can be an effective alternative to traditional disposal of food and agricultural waste (biowaste) such as landfills because its larvae are able to quickly transform biowaste into ready-to-use biomass. However, several challenges remain to ensure that BSF farming is economically viable at different scales and can be widely implemented. Manual labor is required to ensure optimal conditions to rear the larvae, from aerating the feeding substrate to monitoring abiotic conditions during the growth cycle. This paper introduces a proof-of-concept automated method of rearing BSF larvae to ensure optimal growing conditions while at the same time reducing manual labor. We retrofit existing BSF rearing bins with a "smart lid," named as such due to the hot-swappable nature of the lid with multiple bins. The system automatically aerates the larvae-diet substrate and provides bio-information of the larvae to users in real time. The proposed solution uses a custom aeration method and an array of sensors to create a soft real time system. Growth of larvae is monitored using thermal imaging and classical computer vision techniques. Experimental testing reveals that our automated approach produces BSF larvae on par with manual techniques.
Evaluating structure learning algorithms with a balanced scoring function
May 29, 2019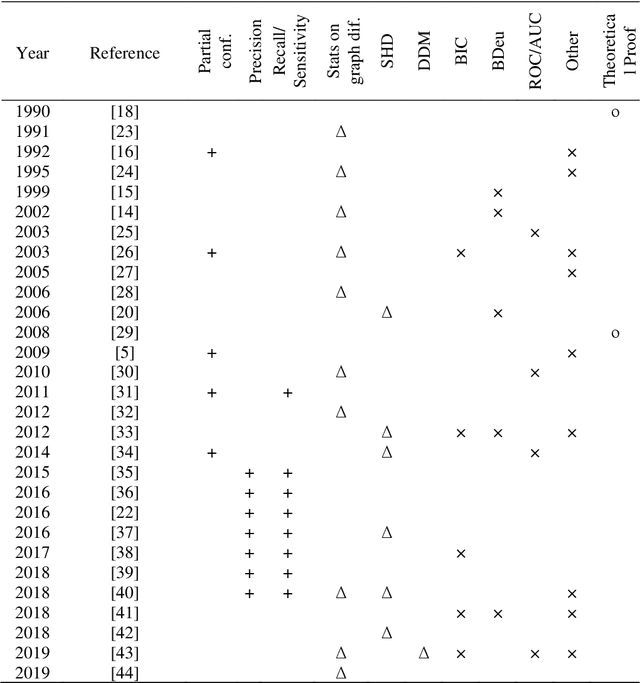
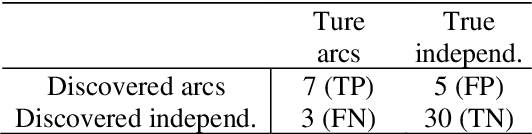
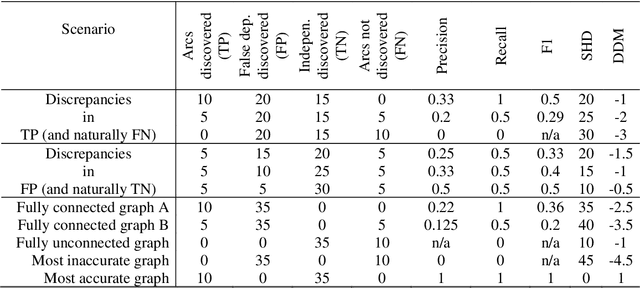
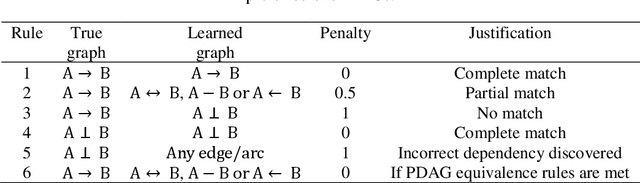
Several structure learning algorithms have been proposed towards discovering causal or Bayesian Network (BN) graphs, which is a particularly challenging problem in AI. The performance of these algorithms is evaluated based on the relationship the learned graph has with respect to the ground truth graph. However, there is no agreed scoring function to determine this relationship. Moreover, this paper shows that the commonly used metrics tend to be biased in favour of graphs that minimise the number of edges. The evaluation bias is inconsistent and may lead to evaluating graphs with no edges as superior to graphs with varying numbers of correct and incorrect edges; implying that graphs that minimise edges are often favoured over more complex graphs due to bias rather than overall accuracy. While graphs that are less complex are often desirable, the current metrics encourage algorithms to optimise for simplicity, and to discover graphs with a limited number of edges that do not enable full propagation of evidence. This paper proposes a Balanced Scoring Function (BSF) that eliminates this bias by adjusting the reward function based on the difficulty of discovering an edge, or no edge, proportional to their occurrence rate in the ground truth graph. The BSF score can be used in conjunction with other traditional metrics to provide an alternative and unbiased assessment about the capability of structure learning algorithms in discovering causal or BN graphs.
Binary Stochastic Filtering: a Solution for Supervised Feature Selection and Neural Network Shape Optimization
Feb 12, 2019
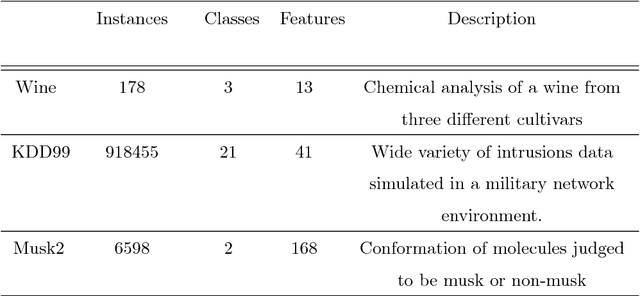
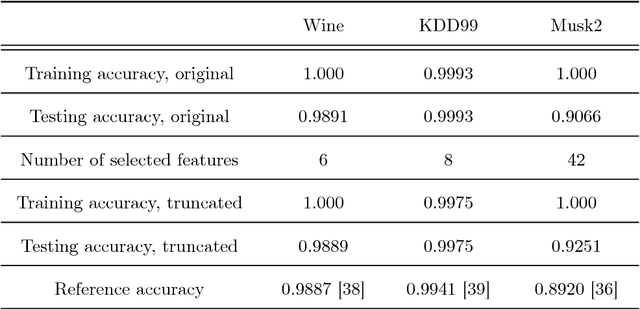
Binary Stochastic Filtering (BSF), the algorithm for feature selection and neuron pruning is proposed in this work. Filtering layer stochastically passes or filters out features based on individual weights, which are tuned during neural network training process. By placing BSF after the neural network input, the filtering of input features is performed, i.e. feature selection. More then 5-fold dimensionality decrease was achieved in the experiments. Placing BSF layer in between hidden layers allows filtering of neuron outputs and could be used for neuron pruning. Up to 34-fold decrease in the number of weights in the network was reached, which corresponds to the significant increase of performance, that is especially important for mobile and embedded applications.