 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysical Attack on Monocular Depth Estimation with Optimal Adversarial Patches
Paper and Code
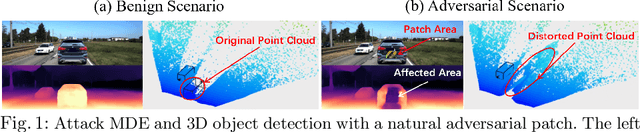
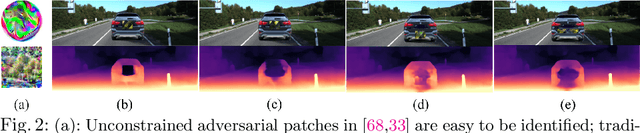
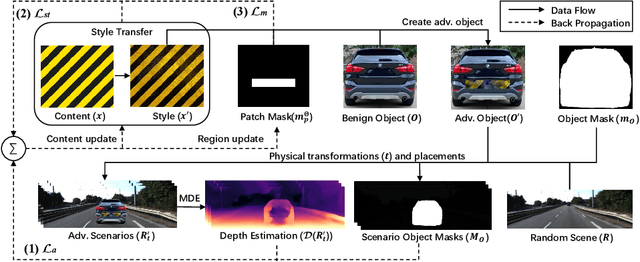
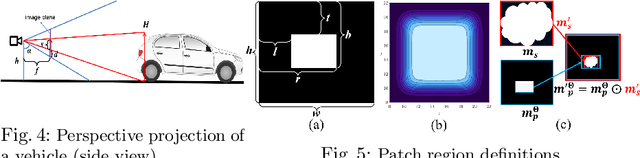
Deep learning has substantially boosted the performance of Monocular Depth Estimation (MDE), a critical component in fully vision-based autonomous driving (AD) systems (e.g., Tesla and Toyota). In this work, we develop an attack against learning-based MDE. In particular, we use an optimization-based method to systematically generate stealthy physical-object-oriented adversarial patches to attack depth estimation. We balance the stealth and effectiveness of our attack with object-oriented adversarial design, sensitive region localization, and natural style camouflage. Using real-world driving scenarios, we evaluate our attack on concurrent MDE models and a representative downstream task for AD (i.e., 3D object detection). Experimental results show that our method can generate stealthy, effective, and robust adversarial patches for different target objects and models and achieves more than 6 meters mean depth estimation error and 93% attack success rate (ASR) in object detection with a patch of 1/9 of the vehicle's rear area. Field tests on three different driving routes with a real vehicle indicate that we cause over 6 meters mean depth estimation error and reduce the object detection rate from 90.70% to 5.16% in continuous video frames.