 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLightweight Dynamic Modeling of Cable-Driven Continuum Robots Based on Actuation-Space Energy Formulation
Paper and Code
Dec 15, 2025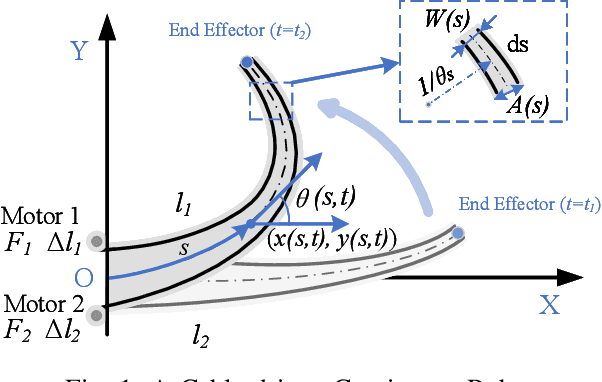
Cable-driven continuum robots (CDCRs) require accurate, real-time dynamic models for high-speed dynamics prediction or model-based control, making such capability an urgent need. In this paper, we propose the Lightweight Actuation-Space Energy Modeling (LASEM) framework for CDCRs, which formulates actuation potential energy directly in actuation space to enable lightweight yet accurate dynamic modeling. Through a unified variational derivation, the governing dynamics reduce to a single partial differential equation (PDE), requiring only the Euler moment balance while implicitly incorporating the Newton force balance. By also avoiding explicit computation of cable-backbone contact forces, the formulation simplifies the model structure and improves computational efficiency while preserving geometric accuracy and physical consistency. Importantly, the proposed framework for dynamic modeling natively supports both force-input and displacement-input actuation modes, a capability seldom achieved in existing dynamic formulations. Leveraging this lightweight structure, a Galerkin space-time modal discretization with analytical time-domain derivatives of the reduced state further enables an average 62.3% computational speedup over state-of-the-art real-time dynamic modeling approaches.